Signals and Systems
7.2 Signal Reconstruction
The Challenge of Reconstruction
- Digital World: Most modern systems process signals in discrete, sampled form.
- Analog World: Our physical world, however, is inherently continuous.
- The Bridge: How do we convert back from discrete samples to a continuous signal that accurately represents the original?
Important
Goal: To recover the original continuous-time signal \(x(t)\) from its discrete samples \(x(nT)\).

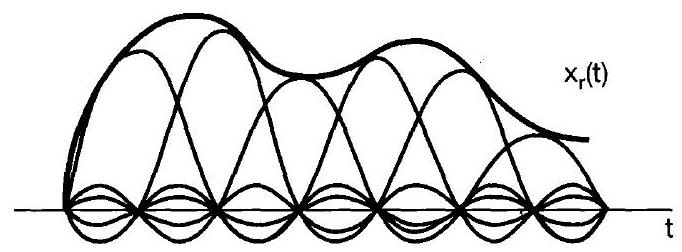
Visualizing Ideal Band-Limited Interpolation
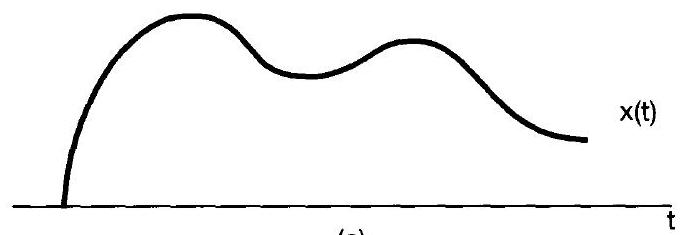
- Original Signal \(x(t)\): A smooth, band-limited signal.
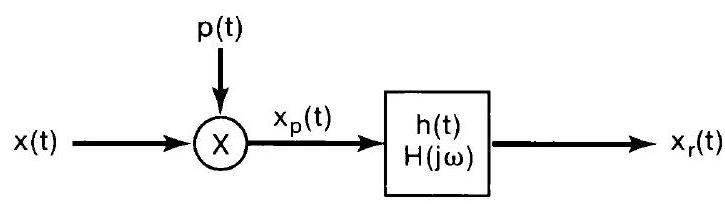
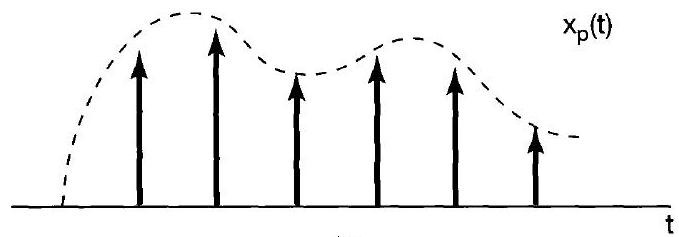
- Impulse Train \(x_p(t)\): The signal represented by discrete impulses at sampling instants.
- Superposition of Sincs: Each impulse is effectively replaced by a scaled sinc function. Their sum perfectly reconstructs \(x(t)\).
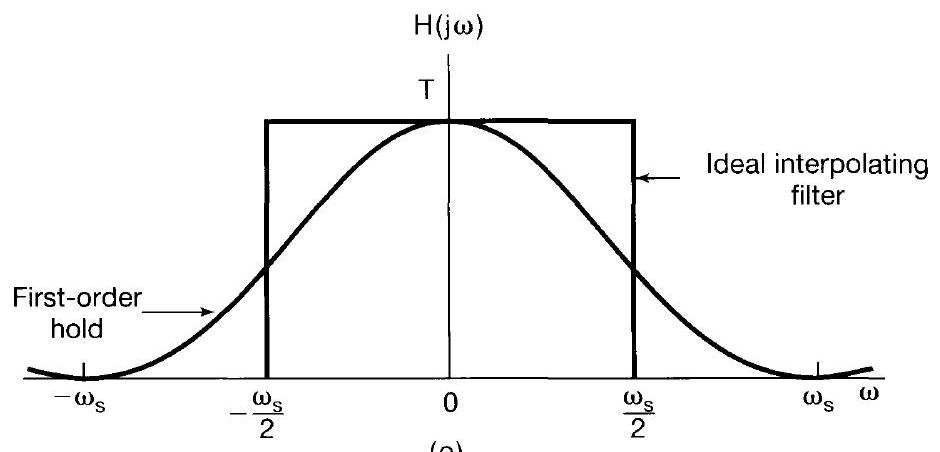
Practical Interpolation: First-Order Hold (Linear Interpolation)
- First-Order Hold (FOH): Connects adjacent sample points with a straight line.
- Provides a smoother output than ZOH.
- Also known as linear interpolation.
Impulse Response (\(h_1(t)\)):
- A triangular pulse of duration \(2T\), centered at \(T\).
- \(h_1(t)\) increases linearly from 0 to 1 for \(0 \le t \le T\).
- \(h_1(t)\) decreases linearly from 1 to 0 for \(T < t \le 2T\).
- \(h_1(t) = 0\) otherwise.
Output: - Continuous, but with discontinuous derivatives (sharp corners at sample points).
Tip
Improvement: FOH offers a better approximation to the ideal filter compared to ZOH.