Signals and Systems
7.1 The Sampling Theorem
Introduction to Sampling: The Digital Frontier
Signals in the real world are often continuous-time (analog). However, modern systems (computers, digital communication) operate on discrete-time (digital) signals.
Sampling is the process of converting a continuous-time signal into a discrete-time sequence.
- Why Sample?
- Digital processing advantages (noise immunity, flexibility).
- Storage and transmission efficiency.
- Enables powerful digital signal processing (DSP) algorithms.
Note
Key Question: How do we convert an analog signal to digital without losing information?
Impulse-Train Sampling: The Model
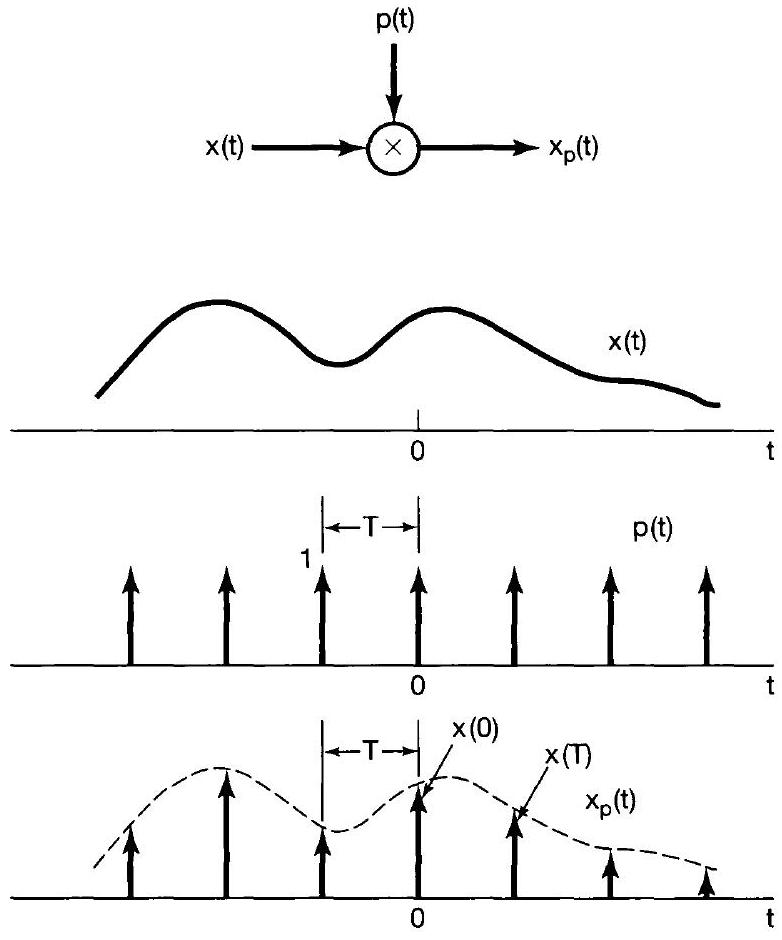
To analyze sampling mathematically, we use impulse-train sampling.
- Continuous Signal: \(x(t)\)
- Sampling Function: A periodic impulse train \(p(t)\). \[
p(t)=\sum_{n=-\infty}^{+\infty} \delta(t-n T)
\]
- \(T\): Sampling Period
- \(\omega_s = 2\pi/T\): Sampling Frequency
- Sampled Signal: \(x_p(t) = x(t)p(t)\)
Using the sampling property of the impulse: \[ x_p(t)=\sum_{n=-\infty}^{+\infty} x(n T) \delta(t-n T) \] This produces an impulse train where each impulse’s amplitude is the value of \(x(t)\) at the sampling instant \(nT\).
Aliasing: When Replicas Overlap
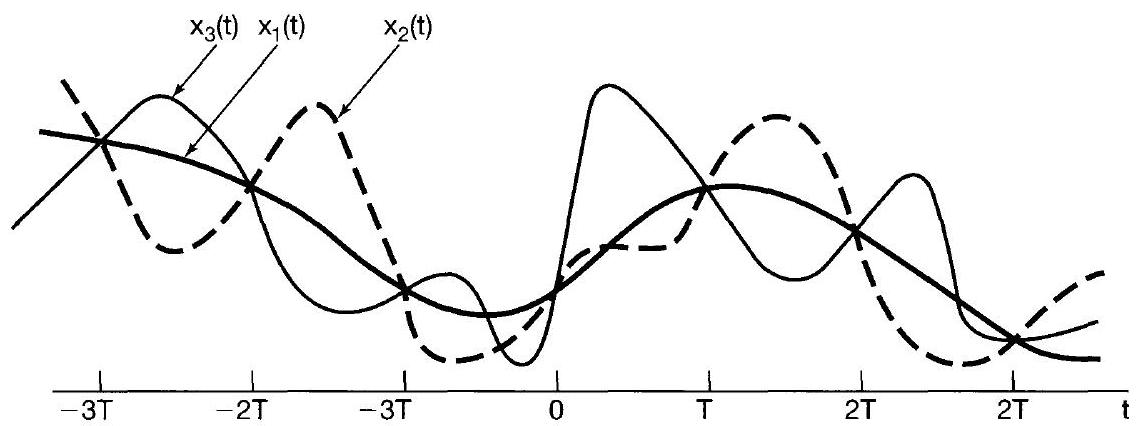
The relationship between the sampling frequency (\(\omega_s\)) and the signal’s bandwidth (\(\omega_M\)) is critical.
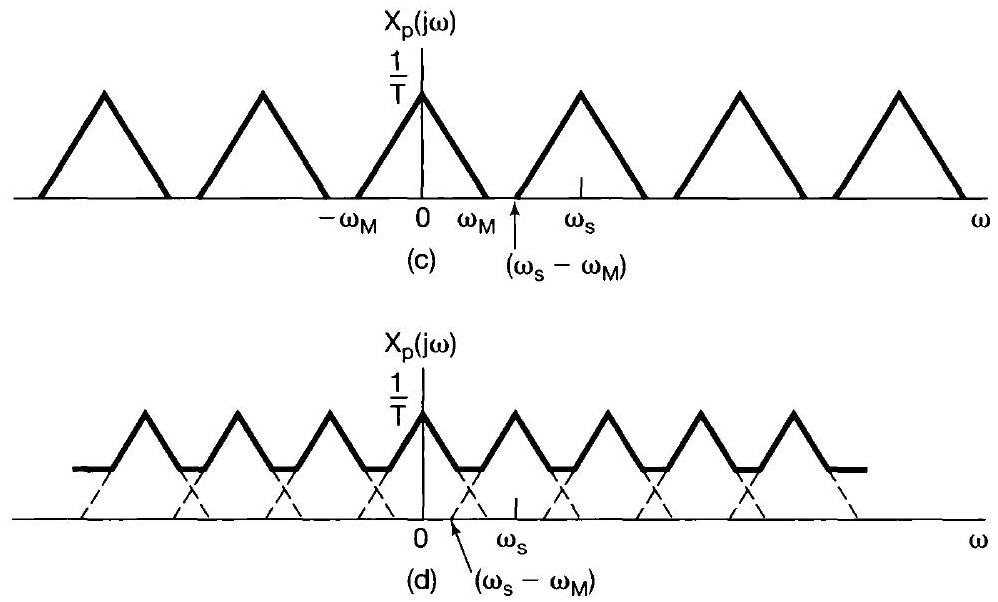
Case 1: No Overlap (\(\omega_s > 2\omega_M\))
- The replicas of \(X(j\omega)\) are perfectly separated.
- The original spectrum \(X(j\omega)\) can be recovered by an ideal lowpass filter.
Case 2: Overlap (\(\omega_s < 2\omega_M\))
- The replicas overlap, causing aliasing.
- Information is lost; the original signal cannot be perfectly reconstructed.
Aliasing in Images




Ideal Reconstruction: The Lowpass Filter
The ideal lowpass filter \(H(j\omega)\) has: \[ H(j\omega) = \begin{cases} T & |\omega| < \omega_c \\ 0 & |\omega| \ge \omega_c \end{cases} \] where \(\omega_M < \omega_c < \omega_s - \omega_M\).
This filter effectively isolates the baseband spectrum \(X(j\omega)\) from its replicas, scaled by \(T\) to restore the original amplitude.

Figure 7.4 (a) and (d): System for sampling and reconstruction, and the ideal lowpass filter.
Practical Sampling: Zero-Order Hold
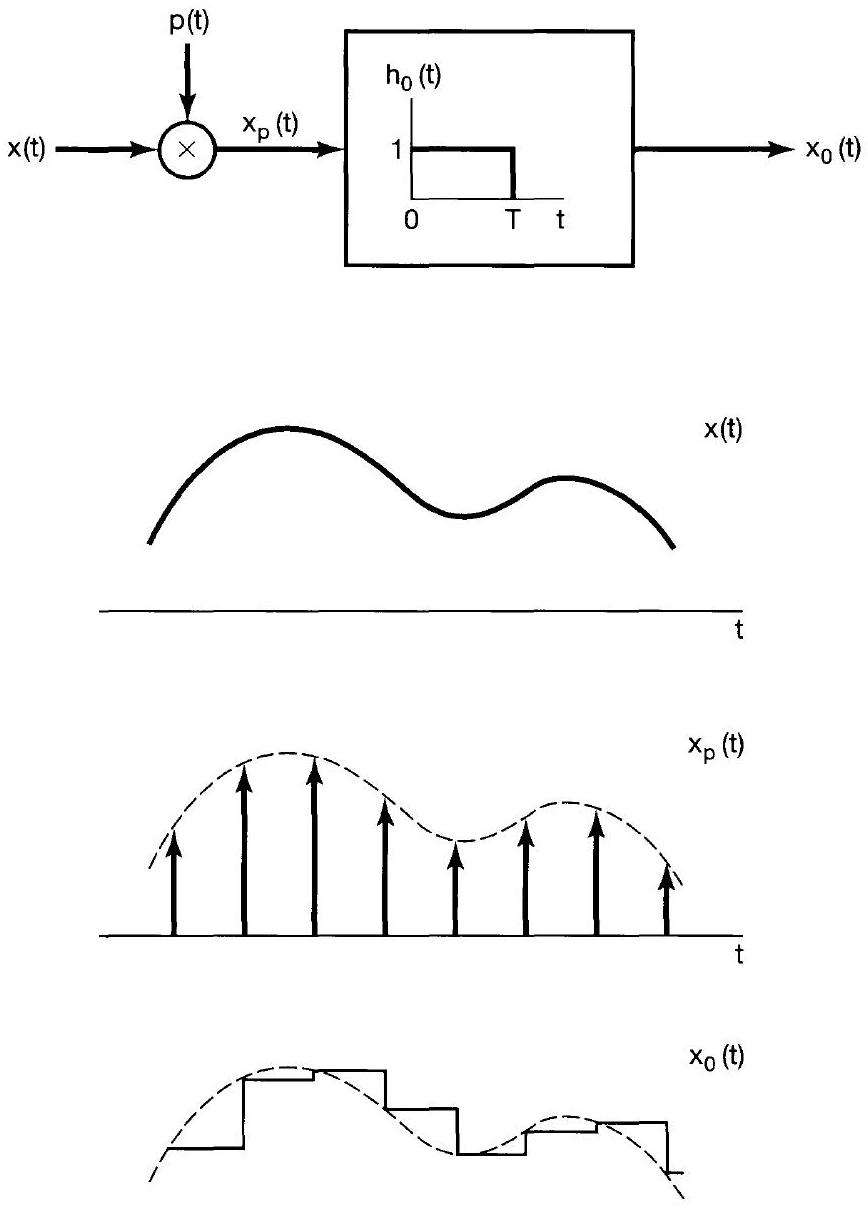
Impulse-train sampling is theoretical. In practice, a zero-order hold is often used.
- Samples \(x(t)\) at an instant and holds that value until the next sample.
- Output \(x_0(t)\) is a staircase-like approximation of \(x(t)\).

Representation: A zero-order hold can be modeled as impulse-train sampling followed by an LTI system with a rectangular impulse response \(h_0(t)\): \[ h_0(t) = \begin{cases} 1 & 0 \le t < T \\ 0 & \text{otherwise} \end{cases} \]
Zero-Order Hold: Reconstruction
To reconstruct \(x(t)\) from \(x_0(t)\), we need a specific filter.
The Fourier Transform of \(h_0(t)\) is: \[
H_0(j\omega) = e^{-j\omega T/2} \left[ \frac{2\sin(\omega T/2)}{\omega} \right]
\] This is a sinc function in frequency.
To reconstruct \(x(t)\), we need to compensate for \(H_0(j\omega)\).
The reconstruction filter \(H_r(j\omega)\) must satisfy: \[ H_r(j\omega) H_0(j\omega) = H_{ideal}(j\omega) \] Where \(H_{ideal}(j\omega)\) is the ideal lowpass filter with gain \(T\).
Thus, the required reconstruction filter is: \[ H_r(j\omega) = \frac{e^{j\omega T/2} H_{ideal}(j\omega)}{\frac{2\sin(\omega T/2)}{\omega}} \]
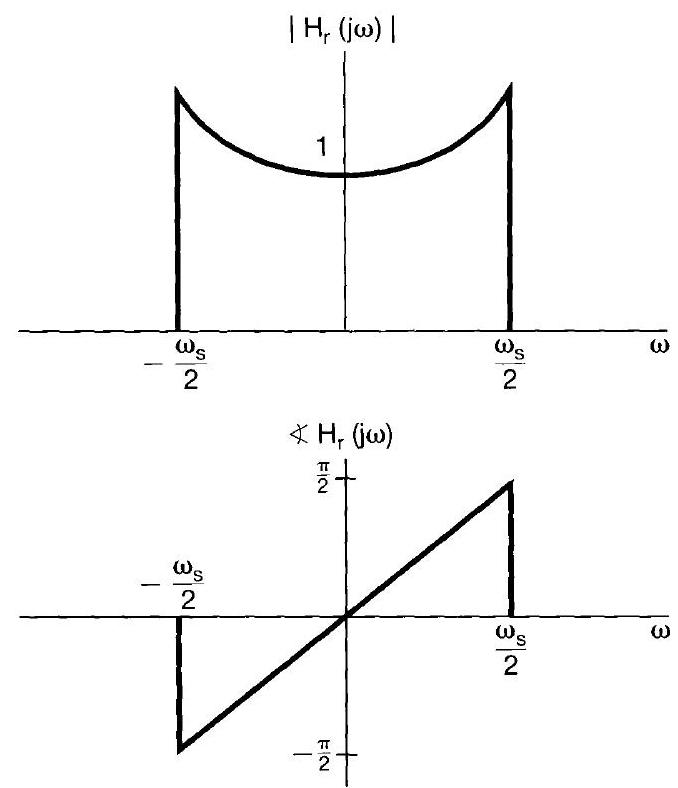
Caution
This reconstruction filter is complex to implement due to the sinc inverse in the denominator and the non-constant gain in the passband.