By the end of this session, you should be able to:
Define control error and describe the practical objectives of a process-control system.
Distinguish stability, steady-state regulation, and transient regulation, and interpret typical response plots.
Explain and compare analog, digital, and ON/OFF control in real-world systems.
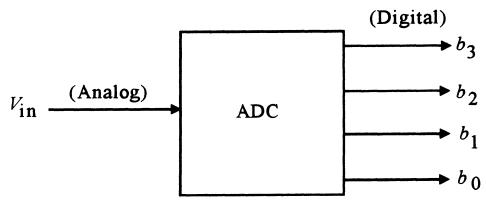
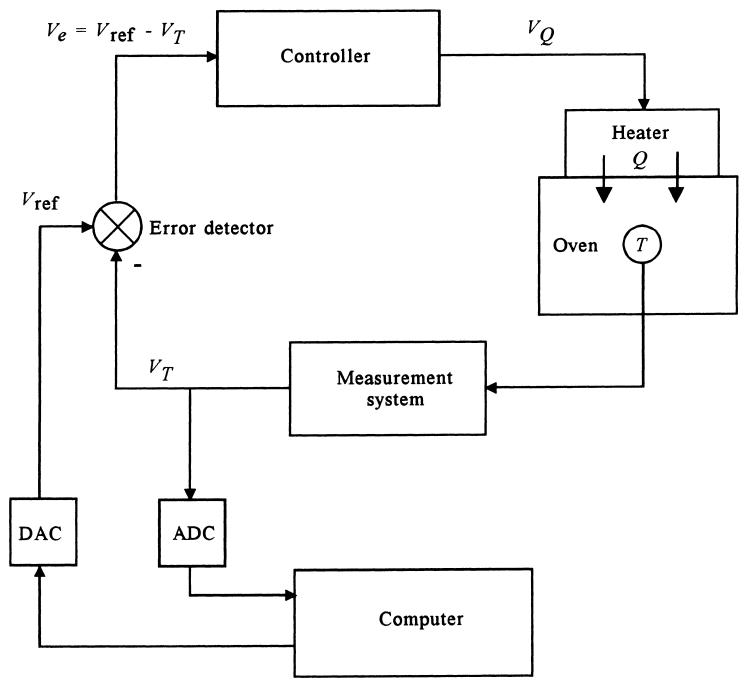
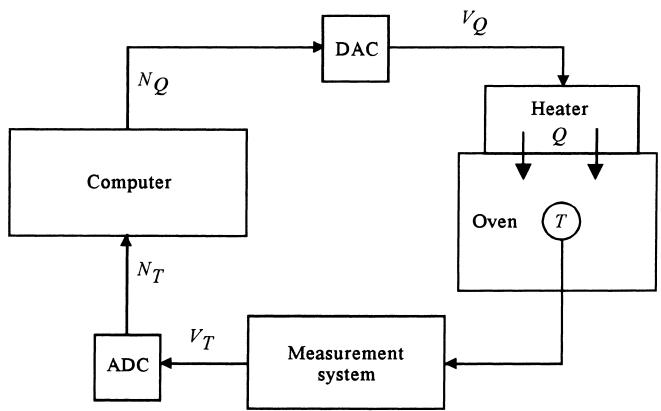
Describe ADC/DAC roles and the structure of supervisory and direct digital control.
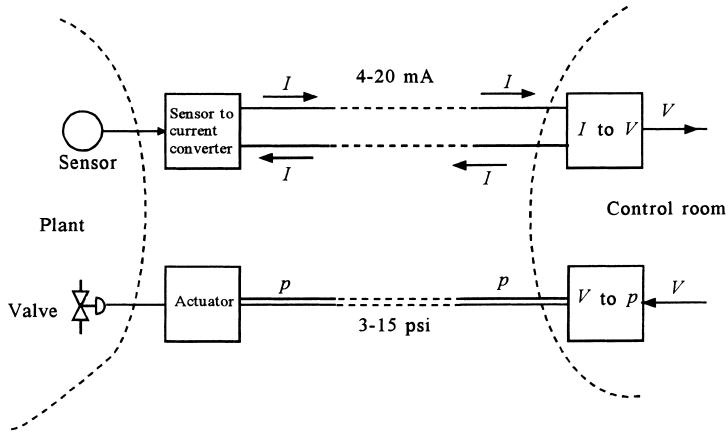
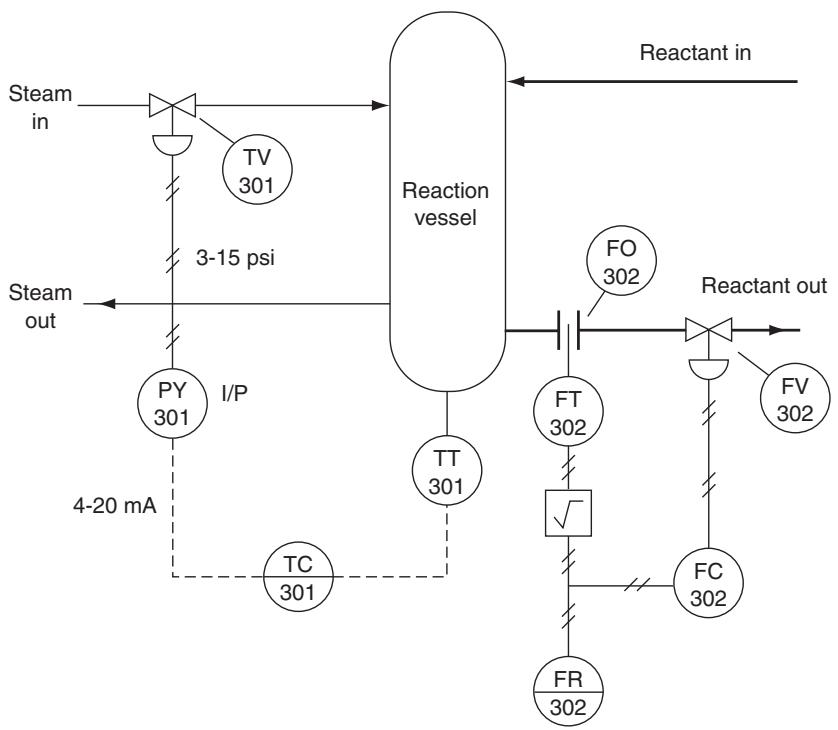
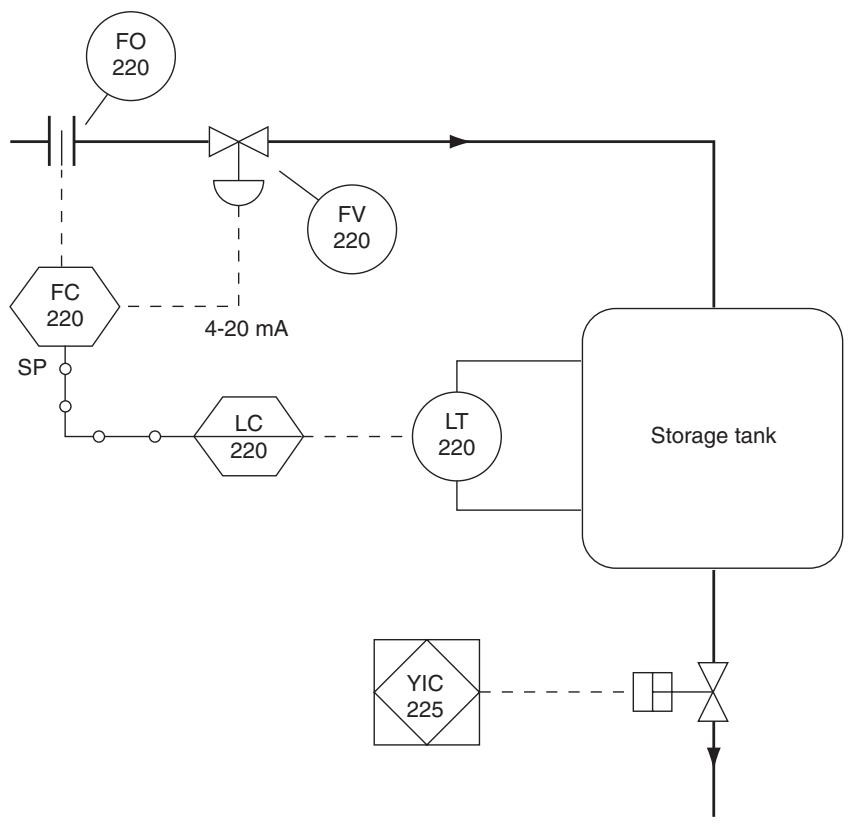
Interpret basic process-control drawings (P&IDs) and standard signal conventions (4–20 mA, 3–15 psi).
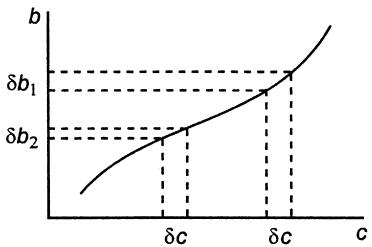
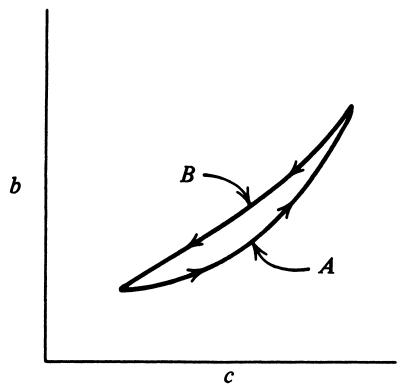
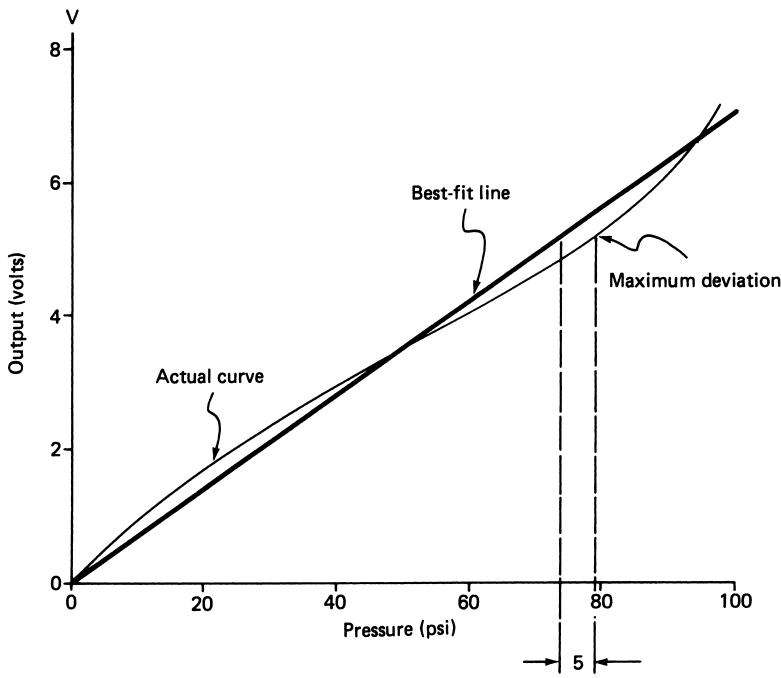
Use SI and English units, metric prefixes, and define accuracy, sensitivity, hysteresis, resolution, and linearity.
Roadmap
Control System Evaluation
Error and control objectives
Stability, steady-state, transient response
Damped and cyclic criteria (minimum area, quarter amplitude)
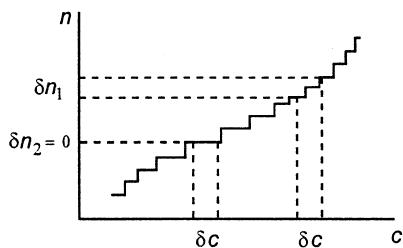
Analog & Digital Processing
Analog vs digital data
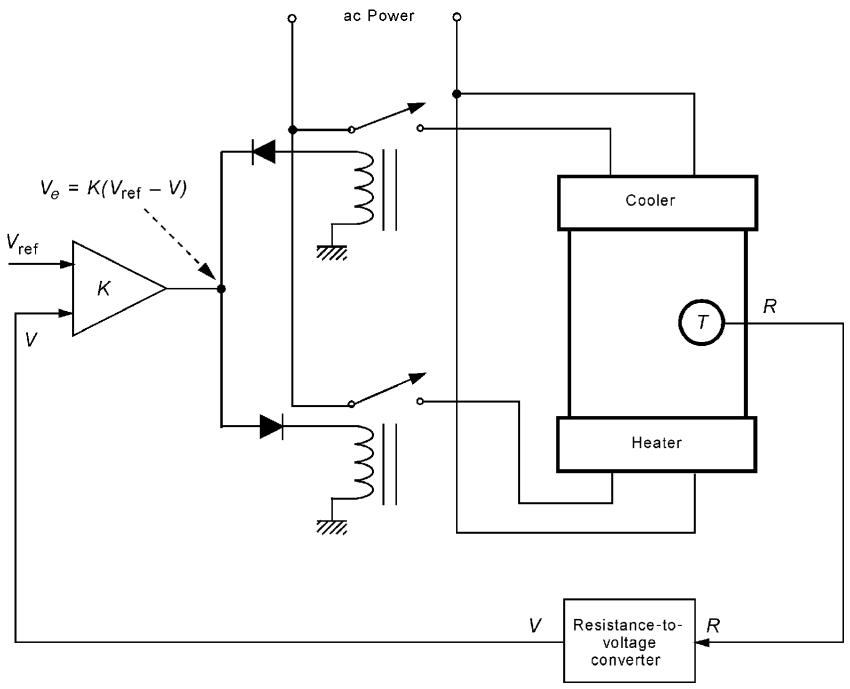
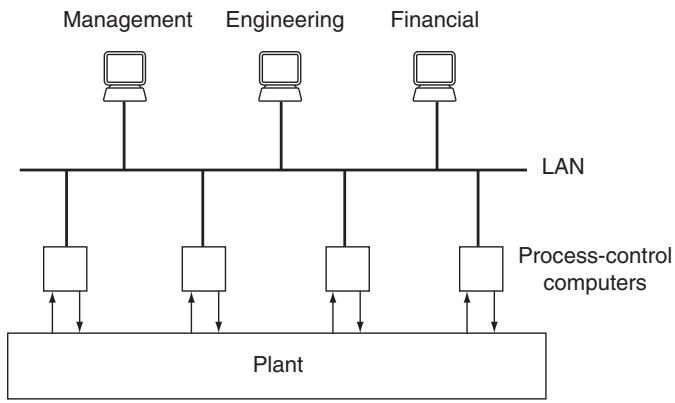
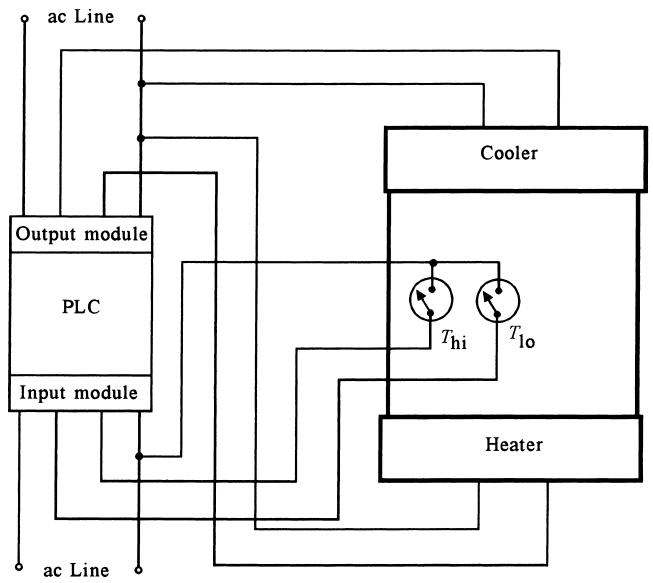
ON/OFF, analog, and digital control (supervisory, DDC, smart sensors, fieldbus)
Units & Standards in Process Control
SI base units, metric prefixes, conversions
4–20 mA and pneumatic standards
Accuracy, resolution, linearity, P&IDs
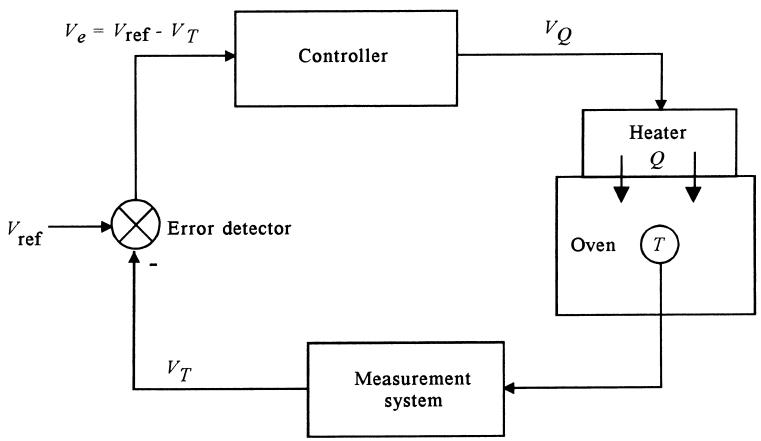
4 Control Error and Objective
The basic performance variable in feedback control is the error:
\[
e(t) = r - c(t)
\]
\(r\): setpoint or reference (often constant, sometimes time-varying).
\(c(t)\): controlled (measured) variable.
\(e(t)\): difference between desired and actual value.
Ideal but impossible goal: make \(e(t) = 0\) for all \(t\).
Realistic goal: keep the error small enough and well-behaved in time for the process requirements.
Important
Three practical control objectives
The system must be stable.
It should have good steady-state regulation (small long-term error).
It should have good transient regulation (acceptable behavior during changes and disturbances).
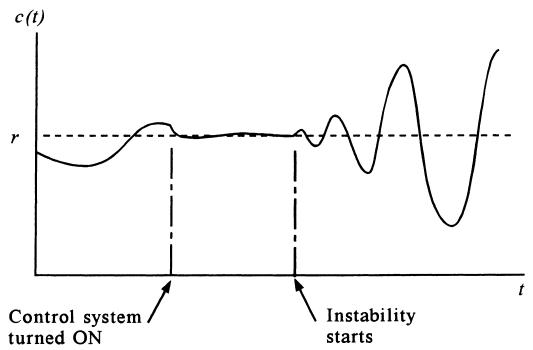
4.1 Stability – Why Controllers Can Make Things Worse
A controller changes the process input based on measurement feedback. If tuned improperly, this feedback can destabilize the process.
Before control: output drifts randomly.
After control is turned on: initially regulated near setpoint.
Later: oscillations grow → instability caused by the control loop.
FIGURE 7: A control system can actually cause a system to become unstable.
Warning
Tightening control (increasing gain, making it more aggressive) usually improves performance up to a point, then dramatically increases instability risk.
Interactive: Visualizing an Unstable Response
4.2 Steady-State Regulation
Steady-state regulation focuses on the long-term error after all transients die out.
Goal: minimize steady-state error.
Often specified as an allowable band around setpoint: \(\pm \Delta c\).
If the output drifts beyond this band, the control system must act to bring it back.
Tip
Steady-state performance is usually improved by integral action in a PID controller, but at the cost of slower transients or increased oscillation risk.
4.3 Transient Regulation
Transient regulation describes how the controlled variable behaves during sudden changes:
Setpoint changes (e.g., jump from \(150^{\circ}\text{C}\) to \(160^{\circ}\text{C}\)).
Disturbances (e.g., inlet flow or ambient temperature suddenly changes).
Key questions:
How fast does the system reach the new setpoint?
How big is the maximum error (overshoot or undershoot)?
Does it ring/oscillate, and how long until it “settles”?
Note
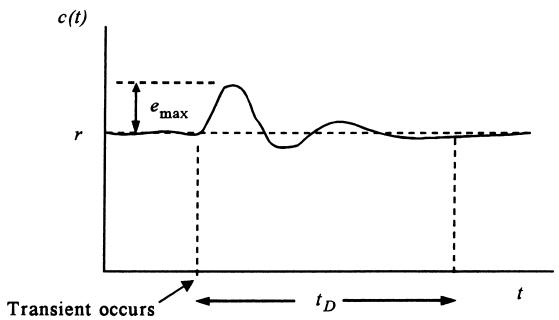
Transient response is usually characterized by:
Duration\(t_D\) (rise/settling time).
Maximum error\(e_{\max}\).
Whether the response is damped or cyclic/oscillatory.
4.4 Evaluation Criteria – Big Picture
How do we judge how “good” a control loop is?
Stability:
Output remains bounded for bounded inputs.
No growing oscillations or runaway behavior.
Steady-State Response:
How small is the long-term error?
How well does it stay within the allowable band?
Transient Response:
How does it respond to setpoint steps and disturbances?
Tradeoff between speed (short \(t_D\)) and overshoot (small \(e_{\max}\)).
4.4 Evaluation Criteria – Big Picture
Tuning = adjusting controller parameters (e.g., PID gains) to balance these aspects.
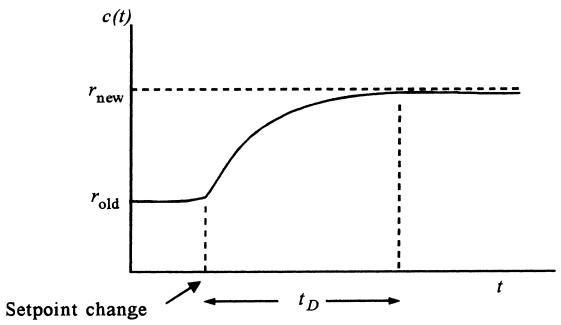
FIGURE 8a. Damped response to setpoint change
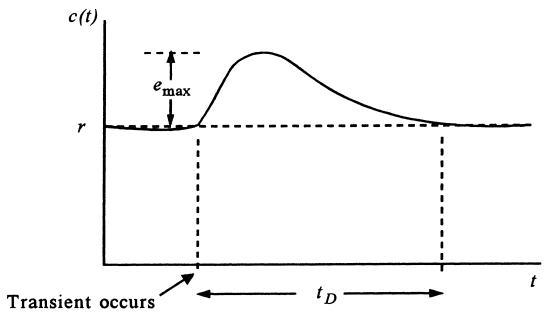
FIGURE 8b. Damped response to transient disturbance.
Damped Response Criteria
In damped response, the error does not change sign; it approaches the setpoint monotonically.
Key metrics:
Duration \(t_D\):
For a setpoint change: time for output to go from 10% to 90% of the total change.
For a disturbance: time from the start of disturbance until output is within 4% of reference.
Maximum error \(e_{\max}\):
Peak deviation from the reference during the transient.
Different tuning → different \((e_{\max}, t_D)\) pairs for the same input.
Tip
Process designers must choose a compromise:
Smaller \(e_{\max}\) but longer \(t_D\), or
Larger \(e_{\max}\) but shorter \(t_D\).
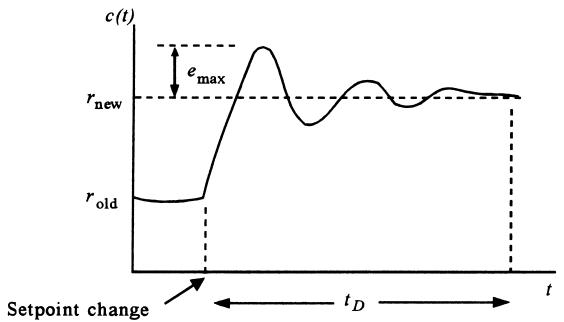
Cyclic (Underdamped) Response
Sometimes the desired response is allowed to oscillate around the setpoint.
In cyclic response:
Output oscillates about reference.
Parameters of interest:
Maximum error \(e_{\max}\).
Duration / settling time \(t_D\):
From when error first exceeds allowable band
To when it returns within the band and stays there.
Again, tuning adjusts the balance between overshoot and speed.
FIGURE 9a: Setpoint change oscillations.
FIGURE 9b: Transient change oscillations.
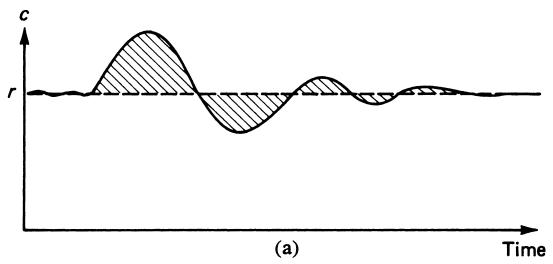
Cyclic Tuning Criteria: Minimum Area and Quarter Amplitude
Two common criteria for oscillatory responses:
Minimum-area criterion
Minimize area under \(|e(t)|\) vs. time curve: \[
A = \int |e(t)|\,dt = \text{minimum}
\]
Intuitively: minimize “total error energy” during the transient.
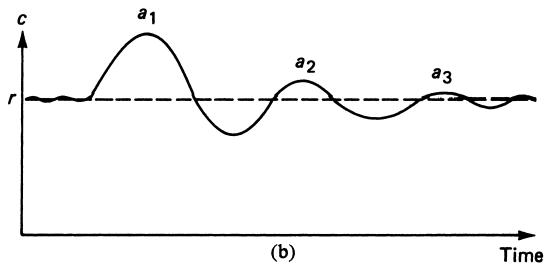
Quarter-amplitude criterion
Each peak is 1/4 of the previous: \[
a_2 = \frac{a_1}{4},\quad a_3 = \frac{a_2}{4}, \dots
\]
Provides a specific underdamped oscillation pattern – reasonably fast decay with some overshoot.
FIGURE 10a. Minimum-area criteria.
FIGURE 10b. Quarter-amplitude criteria.
Problem Example: Choosing a Response
Scenario: You are tuning a temperature loop. A step change in setpoint causes the following:
Temperature sensor: 5 mV/°C → resolution and accuracy relate voltage to temperature via: \[
\Delta T = \frac{\Delta V}{5\ \text{mV}/^{\circ}\text{C}}
\]