The system uses information about its output to continuously correct itself.
Important
A process-control loop is typically a feedback loop. Feedback can both improve performance and cause instability if misused.
Evaluating Control System Performance
We now ask: How well is the control system working?
We use error as the performance measure:
\[
e(t) = r - c(t)
\]
Three main objectives:
Stability
Good steady-state regulation
Good transient regulation
Tuning the control loop = adjusting it to balance these objectives.
Objective 1: Stability
Purpose of control: regulate a variable by acting on the process.
If the controller acts too aggressively or incorrectly, it can cause instability.
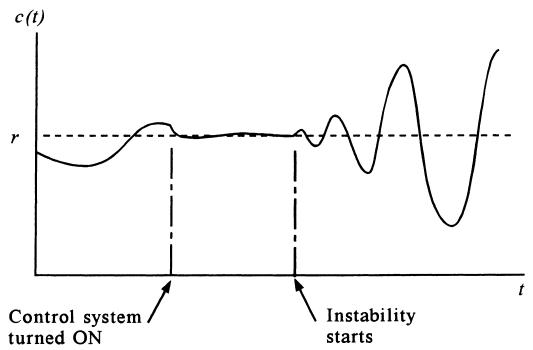
Figure 7: Initially, uncontrolled drift. After control is turned on, variable moves to setpoint, then later develops growing oscillations due to instability.
Warning
A control system can cause a system to become unstable. Tight control (fast response) often risks instability.
Objective 2: Steady-State Regulation
Steady-state regulation:
How small is the error after transient effects die out?
Often specified as an acceptable band:
Allowable deviation \(\pm \Delta c\) around setpoint.
Example:
Setpoint \(150^\circ\mathrm{C}\).
Allowable band: \(148^\circ\mathrm{C} \le c \le 152^\circ\mathrm{C}\).
Goal: Minimize steady-state error while maintaining stability.
Note
Steady-state performance is about accuracy of long-term regulation.
Objective 3: Transient Regulation
Transient regulation asks: How does the system behave when a sudden change occurs?
Two main types of transients:
Setpoint change:
Example: change temperature setpoint from \(150^\circ\mathrm{C}\) to \(160^\circ\mathrm{C}\).
Disturbance/change in other variables:
Example: sudden change in inlet flow or feed composition.
Key questions:
How large is the temporary deviation from desired value?
How long does it take to return close to the setpoint?
This is often called the transient response.
Important
Good transient regulation = small overshoot and short time to settle.
Overall Evaluation Criteria
We evaluate a control system by:
Ensuring stability (no unbounded oscillations).
Assessing steady-state error (accuracy of long-term regulation).
Assessing transient response:
To setpoint changes.
To disturbances.
The process of adjusting the control loop to meet these criteria is called tuning.
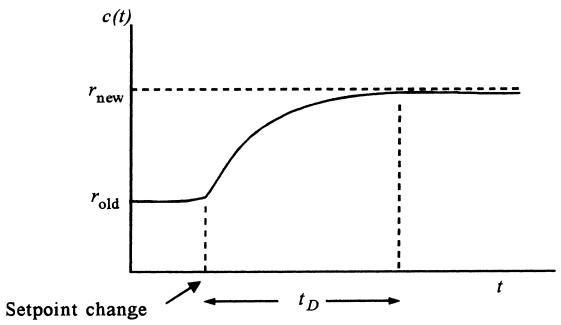
Damped (Overdamped) Response
In one tuning approach, we desire a damped response:
Error does not oscillate around the setpoint.
It moves in one direction toward the new value and stays there.
Measures:
Duration\(t_D\):
For setpoint change: time from 10% to 90% of final change.
For transient: time from disturbance start until variable is within 4% of reference again.
Maximum error\(e_{\max}\) during the transient.
Tradeoffs:
You can get smaller \(e_{\max}\) at cost of larger \(t_D\), and vice versa.
Figure 8: Damped response to setpoint and transient changes
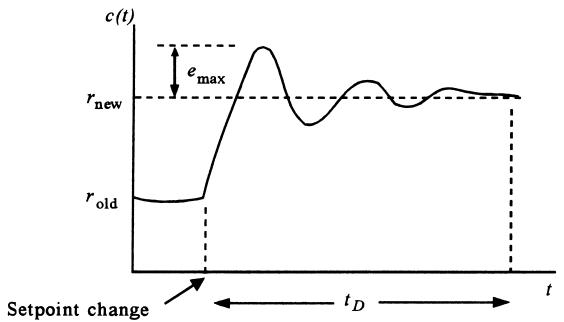
Cyclic (Underdamped) Responsea
Another tuning approach allows oscillatory (cyclic) transient response.
Measures:
Maximum error\(e_{\max}\).
Settling time\(t_D\): time from when error first exceeds allowable band until it returns within band and stays there.
Again, tuning changes:
Number of oscillations.
Amplitude of oscillations.
Settling time.
Figure 9: Setpoint and disturbance responses with oscillations (cyclic response)
Warning
Cyclic response is acceptable only if oscillations are damped and stay within acceptable error limits.
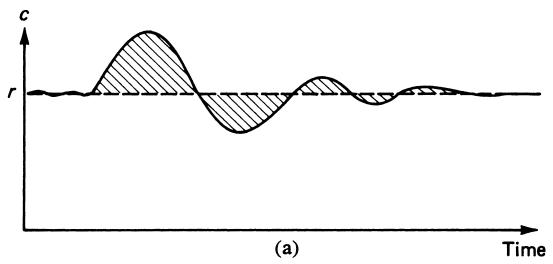
Quantitative Cyclic Criteria: Minimum Area & Quarter-Amplitude
Two standard cyclic tuning criteria:
Minimum Area Criterion
Define error-area:
\[
A = \int |e(t)|\,dt
\]
Tune controller to minimize\(A\) for a given excitation.
Interpreted as minimizing the total cumulative error over time.
Shaded region = area under \(|e(t)|\).
Quarter-Amplitude Criterion
In oscillatory response, each peak amplitude is ¼ of the previous:
Historically popular in process control tuning (e.g., Ziegler–Nichols).
Minimum area and quarter-amplitude criteria
Figure 10: Minimum area and quarter-amplitude response shapes.
Interactive Exercise: Explore a Simple First-Order Response
Use this interactive code block to see how a simple first-order system responds to a step change in setpoint.
Adjust time constant and gain to see how they affect speed and error.
viewof tau = Inputs.range([0.1,10], {step:0.1,value:2,label:"Time constant τ"})viewof k = Inputs.range([0.1,5], {step:0.1,value:1,label:"Gain K"})
Summary / Key Points
Control systems force environmental or process variables to have desired values.
Process control focuses on regulating variables (like level, temperature, flow) to constant setpoints despite disturbances.
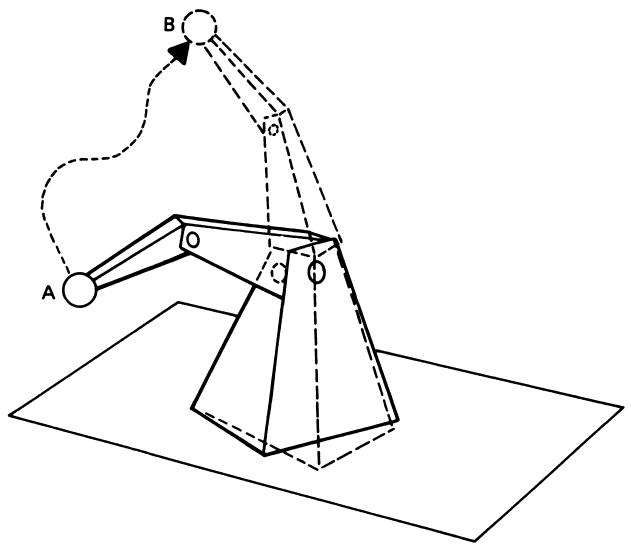
Servomechanisms perform tracking of time-varying references (e.g., robot arm motion).
Discrete-state control systems manage sequences of events (on/off, start/stop) and are often implemented using PLCs.
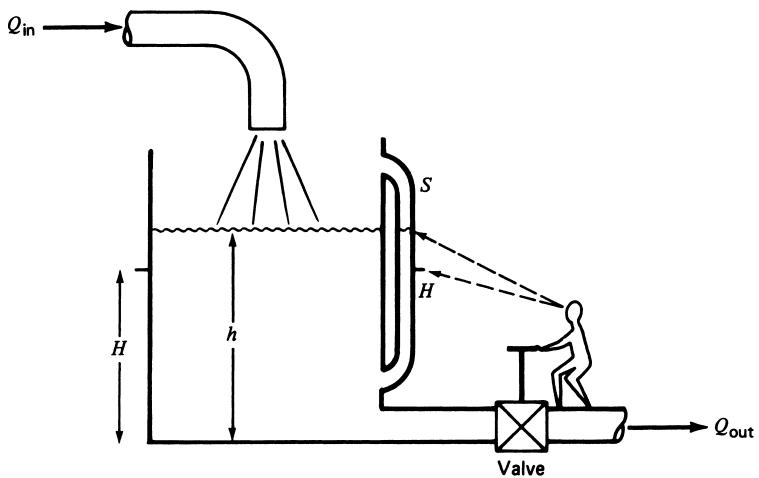
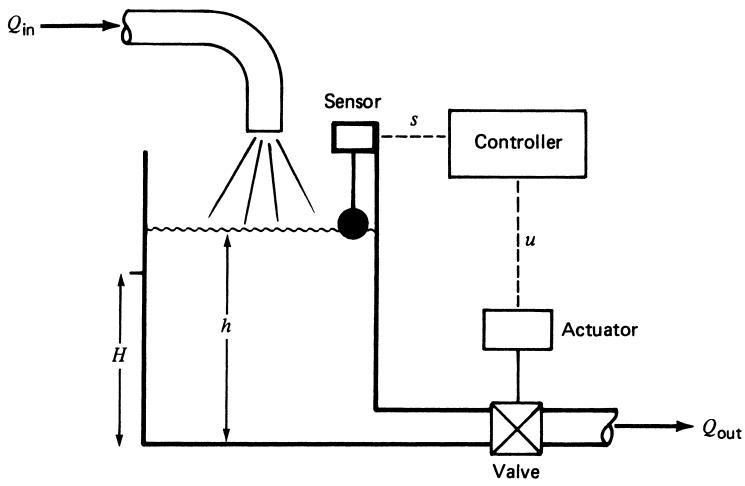
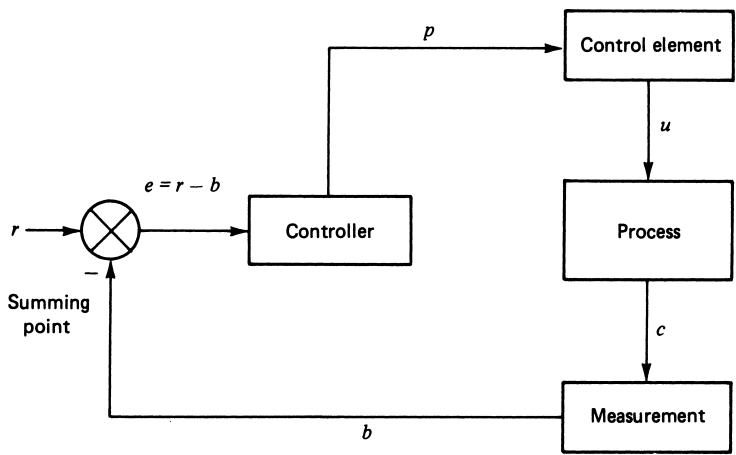
A generic process-control loop includes:
Process (plant).
Measurement & sensor.
Error detector \(e = r - b\).
Controller.
Control element (final control element) and actuator.
Summary / Key Points
The loop forms a feedback system, where measured output is used to adjust input.
Control performance is evaluated via:
Stability (no unbounded oscillations).
Steady-state regulation (small long-term error).
Transient response (overshoot, settling time).
Tuning adjusts controller parameters to trade off between speed, error magnitude, and stability, using criteria such as minimum area or quarter-amplitude decay.
Formula & Notation Summary
Key variables and formulas used in this session:
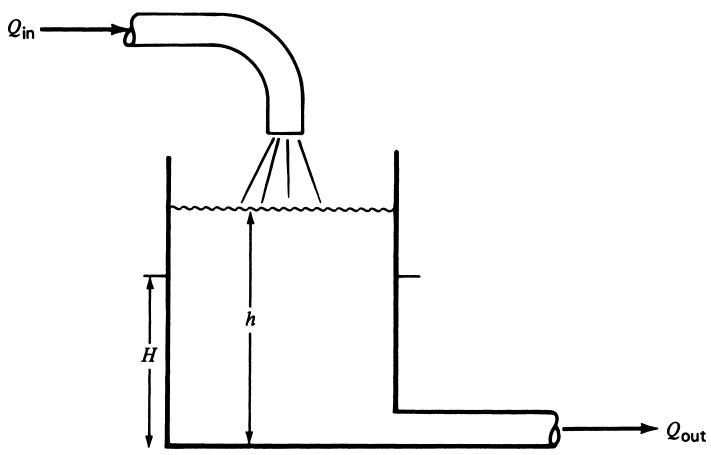
Flow–level relation in tank:
\[
Q_{\mathrm{out}} = K\sqrt{h}
\]
Self-regulated level for given \(Q_{\mathrm{in}}\):
\[
Q_{\mathrm{out}} = Q_{\mathrm{in}} \Rightarrow
h = \left(\frac{Q_{\mathrm{out}}}{K}\right)^2
\]