8.3 Infinite Impulse Response (IIR) Filter Design
Digital Signal Processing
8.6–8.8 Infinite Impulse Response (IIR) Filter Design and Realization
This entire deck is meant for one or two 50‑minute lectures in an undergraduate DSP course. We’ll move from continuous‑time (analog) filters to discrete‑time (digital) IIR filters , focus on two design approaches (impulse invariant and pole–zero placement), and then show how to implement these filters using direct‑form structures and cascade sections. Emphasize the connection to real ECE systems: audio filters, communication channel filters, and control systems.
Real‑World ECE Motivation
Where do IIR filters show up?
Wireless communications
IF bandpass filters, channel shaping
Audio / speech
Equalizers, telephone channel models
Control systems
Digital equivalents of analog compensators
Sensors & instrumentation
Lowpass filters for noise reduction
Why IIR instead of FIR?
Often achieve sharp transitions with lower order
Can mimic analog filters (Butterworth, Chebyshev, etc.)
Use a quick analogy: - FIR filters are like “finite memory” systems (moving average). - IIR filters are like analog RC/RLC circuits—feedback gives infinite impulse response and efficient sharp filtering.
Mention that many legacy systems started as analog and were later digitized; impulse invariance is one way to do that translation.
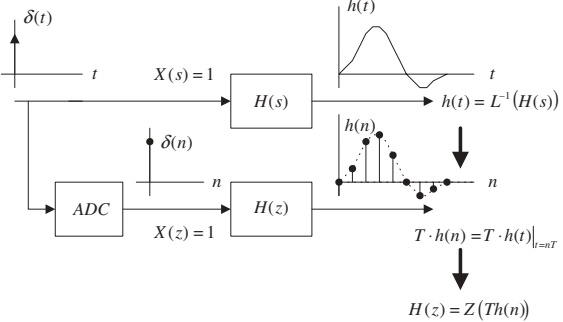
Mathematically:
\[
h(t) = \mathcal{L}^{-1}\{H(s)\}
\]
\[
T h(n) = T h(t)\big|_{t=nT},\quad n\ge 0
\]
\[
H(z) = \mathcal{Z}\{T h(n)\}
\]
Key idea: The digital impulse response is a sampled (and scaled) version of the analog impulse response . This makes the time‑domain behavior similar, especially for low frequencies.
Emphasize: Unlike the bilinear transform , impulse invariance directly samples the continuous‑time impulse response. Students usually confuse “sample the input” vs “sample the impulse response”; highlight that here we are sampling \(h(t)\) itself\(T\) because the integral (area) of the analog impulse response should match the sum (area of rectangles) of the digital impulse response.
Area and DC Gain Matching
The scaling factor \(T\) is chosen so that the area under \(h(t)\) matches the sum of \(T h(n)\) :
\[
\int_0^{\infty} h(t)\,dt \;\approx\; T h(0) + T h(1) + T h(2) + \cdots
\]
Left side: DC gain of the analog filter.
Right side: DC gain of the digital filter.
As \(T \to 0\) (sampling frequency \(f_s = 1/T \to \infty\) ):
Rectangular approximation becomes very accurate.
DC gain of digital filter \(\approx\) DC gain of analog filter.
But for practical \(T\) , we may need extra gain scaling to match an exact DC gain.
Connect this to Riemann sums from calculus: the sum \(T\sum h(n)\) approximates the integral. Point out that in Example 8.15, they later rescale \(H(z)\) to enforce unit DC gain, which is common practice when the passband gain is specified.
Example 8.15 – Analog to Digital (1/3)
Given analog transfer function:
\[
H(s) = \frac{2}{s + 2}
\]
Sampling rate: \(f_s = 10\ \text{Hz} \Rightarrow T = 0.1\ \text{s}\)
Step 1: Inverse Laplace transform to get analog impulse response :
\[
h(t) = \mathcal{L}^{-1}\left\{\frac{2}{s + 2}\right\} = 2 e^{-2t} u(t)
\]
Step 2: Sample and scale:
\[
T h(n) = T \cdot 2 e^{-2nT} u(n) = 0.2 e^{-0.2 n} u(n)
\]
Step 3: Use \(z\) ‑transform pair (Chapter 5):
\[
\mathcal{Z}\{e^{-a n} u(n)\}
= \frac{z}{z - e^{-a}}
\]
Here, \(a = 0.2\) , so \(e^{-a} = e^{-0.2} \approx 0.8187\) .
Clarify \(a\) : The discrete‑time sequence is \(e^{-a n}\) with \(a>0\) . Here \(e^{-a} = e^{-0.2}\) is the common ratio of the exponential sequence. Also remind students that \(u(n)\) (unit step) ensures causality (\(n \ge 0\) ).
Example 8.15 – Analog to Digital (2/3)
Apply the \(z\) ‑transform to \(T h(n)\) :
\[
H(z) = \mathcal{Z}\{0.2 e^{-0.2n} u(n)\}
= 0.2 \,\mathcal{Z}\{e^{-0.2n} u(n)\}
= 0.2\,\frac{z}{z - 0.8187}
\]
Express in standard IIR form:
\[
H(z) = \frac{0.2 z}{z - 0.8187}
= \frac{0.2}{1 - 0.8187 z^{-1}}
\]
This is a first‑order IIR lowpass‑like filter with:
One pole at \(z = 0.8187\) (inside unit circle)
One zero at \(z = 0\)
To quickly sketch the frequency response: - Pole close to \(z=1\) → large low‑frequency gain - Zero at \(z=0\) → attenuates high frequencies.
Show or sketch a simple pole–zero plot on the board: - Real axis: mark 0.8187; that’s the pole. - Zero at origin. Use this to intuitively justify why the magnitude response looks lowpass. Mention that the exact magnitude and phase responses are plotted in MATLAB (Program 8.12).
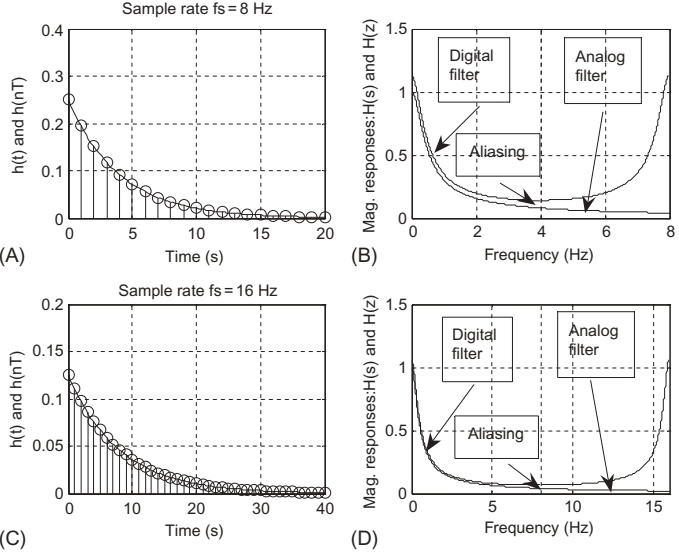
Aliasing in Impulse Invariant Design
Key issue: The analog impulse response \(h(t)\) is generally not band‑limited .
Sampling \(h(t)\) at rate \(f_s\) :
Any frequency content above Nyquist frequency \(f_s/2\) gets aliased back into \([0, f_s/2]\) .
This causes distortion in the digital filter’s frequency response.
Fig. 8.29 shows this numerically for Example 8.15:
(A, B): Sampling at \(f_s = 8\ \text{Hz}\) (T=0.125 s) → strong aliasing, poor match.
(C, D): Sampling at \(f_s = 16\ \text{Hz}\) → less aliasing , better magnitude match.
Aliasing cannot be eliminated in the impulse invariant method because we sample a non‑band‑limited impulse response. We can only reduce aliasing by: - Increasing sampling frequency \(f_s\) , or - Designing the analog filter with a very low cutoff frequency.
Use a real‑world analogy: sampling a sharp spike vs sampling a smooth sine wave. Sharp, fast decay in time often implies high‑frequency content in frequency domain.
Stress that this is why the impulse invariant method is not recommended for highpass or bandstop filters: those responses inherently concentrate energy near the folding frequency , where aliasing is worst.
When to Use Impulse Invariance
From the aliasing analysis:
Analog highpass or bandstop filters have significant energy near the Nyquist limit even when oversampled.
Sampling their impulse responses leads to maximum aliasing .
So:
Do not use impulse invariance alone to design digital highpass or bandstop IIR filters (unless using extra anti‑aliasing or prewarping tricks).Prefer bilinear transform (BLT) for highpass or bandstop designs.
Impulse invariant design is appropriate for:
Lowpass filters.Bandpass filters when sampling rate is much larger than the largest passband frequency.
Rule of thumb: Use impulse invariant for low frequency, lowpass/bandpass designs with high oversampling . Use BLT for highpass / bandstop and more general cases.
Tie this back to design flow: - If the analog prototype is already given (e.g., from a control engineer), choose the digital mapping. - If you must preserve time‑domain shape (e.g., step responses), impulse invariance can be attractive, but always check aliasing.
Example 8.16 – Second‑Order Bandpass via Impulse Invariance (1/3)
Given analog transfer function:
\[
H(s) = \frac{s}{s^2 + 2s + 5}
\]
Sampling rate: \(f_s = 10\ \text{Hz} \Rightarrow T = 0.1\ \text{s}\)
Step 1: Complete the square in denominator:
\[
H(s) = \frac{s}{(s+1)^2 + 2^2}
\]
Rewrite numerator to match table form:
\[
H(s) = \frac{(s+1) - 1}{(s+1)^2 + 2^2}
= \frac{s+1}{(s+1)^2 + 2^2} - 0.5\frac{2}{(s+1)^2 + 2^2}
\]
Use Laplace transform table:
\(\mathcal{L}^{-1}\big\{\frac{s+a}{(s+a)^2 + \omega_0^2}\big\} = e^{-a t}\cos(\omega_0 t) u(t)\) \(\mathcal{L}^{-1}\big\{\frac{\omega_0}{(s+a)^2 + \omega_0^2}\big\} = e^{-a t}\sin(\omega_0 t) u(t)\)
So analog impulse response is:
\[
h(t) = e^{-t}\cos(2t)\,u(t) - 0.5 e^{-t}\sin(2t)\,u(t)
\]
Highlight that this is a typical underdamped second‑order system : exponentially decaying sinusoid. Students should recognize that such systems often correspond to bandpass behavior. The two terms correspond to cosine and sine components.
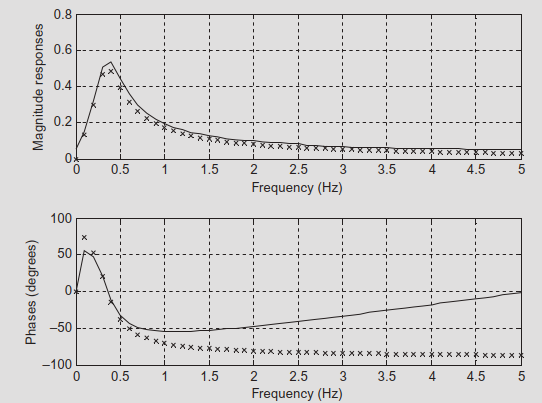
Example 8.16 – Frequency Response (3/3)
Program 8.13 uses:
freqs([10],[1 2 5],w) (conceptually) for the analog \(H(s)\) freqz([0.1 -0.09766],[1 -1.7735 0.8187], length(w)) for the digital \(H(z)\)
Observations:
The shape of the digital filter’s magnitude response (bandpass) matches the analog filter’s shape.
The passband gain is higher for the digital filter; again, gain scaling can be applied if unit gain is required.
When comparing analog and digital designs: - Match frequency axes in Hz : use \(\Omega = 2\pi f T\) for digital. - Focus on shape (location of peaks, nulls, bandwidth) first, then adjust gain .
This is a good place to ask students: - Where do you expect the center frequency to be in Hz? - How does the sampling rate relate to the discrete‑time frequency where the peak occurs?
Also note that impulse invariance preserves the analog impulse response shape at integer multiples of \(T\) , which often indirectly preserves resonant frequencies reasonably well for sufficiently large \(f_s\) .
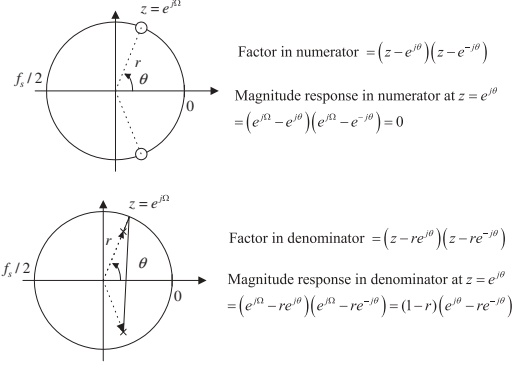
8.7 Pole–Zero Placement: Intuition
In the \(z\) ‑plane, consider placing poles and zeros and evaluating the response on the unit circle \(z = e^{j\Omega}\) .
Place a zero at angle \(\theta\) on the unit circle: \(z_0 = e^{j\theta}\) .
Numerator factor: \((z - e^{j\theta})(z - e^{-j\theta})\) .
At \(\Omega = \theta\) , one factor is \((e^{j\theta} - e^{j\theta}) = 0\) → magnitude null .
Place poles at \(z_p = r e^{\pm j\theta}\) , with \(r < 1\) :
Denominator factor: \((z - re^{j\theta})(z - re^{-j\theta})\) .
At \(\Omega = \theta\) , distance from \(e^{j\theta}\) to pole is \((1 - r)\) → small denominator → large magnitude .
Rule of thumb:
Zeros suppress magnitude near their angle.
Poles boost magnitude near their angle.
Draw a quick sketch: - Unit circle. - A zero on the circle and a pole just inside, both at the same angle. Then trace how distances from evaluation point \(e^{j\Omega}\) change as \(\Omega\) sweeps around the circle.
This geometric view is extremely powerful and will be reused when designing bandpass, bandstop, lowpass, and highpass filters by hand.
Application of Pole–Zero Placement
By combining pole and zero placements, we can create different filter types :
Lowpass :
Pole(s) near \(z=1\) , zeros near \(z=-1\) or on unit circle at higher frequencies.
Highpass :
Zero at \(z=1\) (kill DC), pole closer to \(z=-1\) to emphasize high frequencies.
Bandpass :
Complex poles at angle \(\theta_0\) (center frequency); zeros at DC and Nyquist to attenuate outside band.
Bandstop (notch) :
Zeros on the unit circle at \(\theta_0\) (notch frequency); poles near zeros (inside unit circle) to restore neighboring frequencies.
Pole–zero placement is:
Intuitive and approximate .Very useful for simple filters with narrow bands or extreme cutoff frequencies.
Stress that this is not the same as systematic design (Butterworth, Chebyshev) but is excellent for quick designs and for understanding how pole locations affect response. In many embedded systems, simple pole–zero designs are enough and easier to implement and tune by hand.
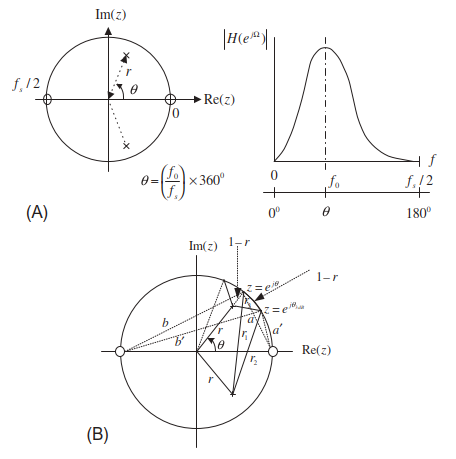
8.7.1 Second‑Order Bandpass Filter – Geometry
Typical placement for a narrow bandpass (Fig. 8.32A):
Complex poles: \(z = r e^{\pm j\theta}\)
Radius \(r\) controls bandwidth .
Angle \(\theta\) sets center frequency .
Zeros: at \(z = 1\) and \(z = -1\)
Zero gain at DC and folding frequency \(f_s/2\) .
Center frequency angle:
\[
\theta = \left(\frac{f_0}{f_s}\right) \times 360^\circ
\]
Bandwidth (approximate narrowband formula):
\[
r \approx 1 - \pi\frac{BW_{3\text{dB}}}{f_s},\quad 0.9 \le r < 1
\]
Explain the derivation idea: - At center frequency, poles are very close to unit circle → large gain. - At 3 dB points, geometry yields \(r_3 = \sqrt{2(1 - r)}\) and then bandwidth \(\approx 2(1-r)\) in normalized radian frequency, leading to \(r = 1 - \pi BW_{3dB} / f_s\) .
Students don’t need to memorize the geometric derivation; they should remember the design formulas and the interpretation.
Second‑Order Bandpass Filter – Transfer Function
General transfer function:
\[
H(z) = \frac{K (z - 1)(z + 1)}{(z - r e^{j\theta})(z - r e^{-j\theta})}
= \frac{K(z^2 - 1)}{z^2 - 2 r \cos\theta\, z + r^2}
\]
Design formulas summary:
Center frequency:
\[
\theta = \left(\frac{f_0}{f_s}\right) 360^\circ
\]
Pole radius:
\[
r \approx 1 - \pi \frac{BW_{3\text{dB}}}{f_s},\quad 0.9 \le r < 1
\]
Implementation form (for code):
\[
H(z) = \frac{b_0 + b_2 z^{-2}}{1 - a_1 z^{-1} + a_2 z^{-2}}
\]
where \(b_0 = K\) , \(b_1 = 0\) , \(b_2 = -K\) , \(a_1 = 2 r \cos\theta\) , \(a_2 = -r^2\) (after factoring a \(z^2\) in numerator and denominator).
Clarify: we can write the denominator as \(z^2 - 2r\cos\theta z + r^2 = z^2 (1 - 2r\cos\theta z^{-1} + r^2 z^{-2})\) and then read off the IIR coefficients. Students will frequently convert between polynomial in \(z\) (for math) and polynomial in \(z^{-1}\) (for implementation).
Example 8.17 – Second‑Order Bandpass Design
Specifications:
Sampling rate: \(f_s = 8000\ \text{Hz}\)
Center frequency: \(f_0 = 1000\ \text{Hz}\)
3‑dB bandwidth: \(BW = 200\ \text{Hz}\)
Zero gain at 0 Hz and 4000 Hz (DC and Nyquist)
Step 1: Compute pole radius \(r\) :
\[
r = 1 - \pi \frac{BW}{f_s}
= 1 - \pi \frac{200}{8000}
= 0.9215
\]
Step 2: Center frequency angle:
\[
\theta = \frac{f_0}{f_s} 360^\circ
= \frac{1000}{8000} 360^\circ
= 45^\circ
\]
Step 3: Gain factor \(K\) :
\[
K = \frac{(1 - 0.9215)\sqrt{1 - 2(0.9215)\cos(90^\circ) + 0.9215^2}}{2|\sin 45^\circ|} = 0.0755
\]
Final transfer function:
\[
H(z) = \frac{0.0755(z^2 - 1)}{z^2 - 2(0.9215)\cos 45^\circ z + 0.9215^2}
= \frac{0.0755 - 0.0755 z^{-2}}{1 - 1.3031 z^{-1} + 0.8491 z^{-2}}
\]
Ask: What is the qualitative shape of this filter? - A narrow bandpass centered at 1000 Hz, strong rejection at DC and 4000 Hz.
You can show how to plug this into MATLAB:
b = [0.0755 0 - 0.0755 ]; a = [1 - 1.3031 0.8491 ]; freqz (b , a , 1024 , 8000 ); and observe the magnitude plot.
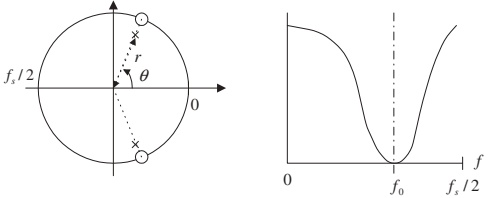
8.7.2 Second‑Order Bandstop (Notch) Filter – Geometry
For a notch (or bandstop) filter:
Poles: same as bandpass, \(z = r e^{\pm j\theta}\) .
Zeros: placed on the unit circle at \(z = e^{\pm j\theta}\) (the notch frequency).
Design formulas:
Center (notch) frequency:
\[
\theta = \left(\frac{f_0}{f_s}\right) 360^\circ
\]
Pole radius:
\[
r \approx 1 - \pi \frac{BW_{3\text{dB}}}{f_s},\quad 0.9 \le r < 1
\]
Transfer function:
\[
H(z) = \frac{K (z - e^{j\theta})(z - e^{-j\theta})}{(z - r e^{j\theta})(z - r e^{-j\theta})}
= \frac{K(z^2 - 2 z\cos\theta + 1)}{z^2 - 2 r z\cos\theta + r^2}
\]
Unit passband gain factor:
\[
K = \frac{1 - 2r\cos\theta + r^2}{2 - 2\cos\theta}
\]
Explain why zeros at \(e^{\pm j\theta}\) notch out that frequency: at \(z=e^{j\theta}\) the numerator is zero, so \(|H(e^{j\theta})| = 0\) . The nearby poles (inside) ensure that frequencies around the notch are not overly attenuated, leading to a narrow notch .
Typical application: removing 50/60 Hz mains hum from biomedical or audio signals.
Example 8.18 – Notch Filter Design
Specifications:
Sampling rate: \(f_s = 8000\ \text{Hz}\)
Center (notch) frequency: \(f_0 = 1500\ \text{Hz}\)
3‑dB bandwidth: \(BW = 100\ \text{Hz}\)
Step 1: Pole radius:
\[
r \approx 1 - \pi\frac{100}{8000} = 0.9607
\]
Step 2: Angle \(\theta\) :
\[
\theta = \frac{1500}{8000} 360^\circ = 67.5^\circ
\]
Step 3: Gain factor \(K\) :
\[
K = \frac{1 - 2(0.9607)\cos 67.5^\circ + 0.9607^2}{2 - 2\cos 67.5^\circ} = 0.9620
\]
Final transfer function:
\[
H(z) = \frac{0.9620(z^2 - 2 z\cos 67.5^\circ + 1)}
{z^2 - 2(0.9607) z\cos 67.5^\circ + 0.9607^2}
\]
\[
= \frac{0.9620 - 0.7363 z^{-1} + 0.9620 z^{-2}}
{1 - 0.7353 z^{-1} + 0.9229 z^{-2}}
\]
Note: there is a small discrepancy in the last denominator coefficient in the text (should be + 0.9229 z^{-2} after normalization w.r.t. \(z^2\) ). Encourage students to verify the entire design in MATLAB with freqz and visually confirm the deep notch at 1500 Hz.
You can also show how slight changes in \(r\) affect the notch width.
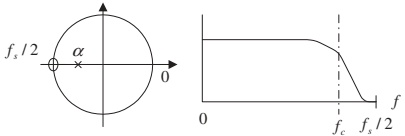
8.7.3 First‑Order Lowpass Filter – Case 1: \(f_c < f_s/4\)
Pole–zero placement (Fig. 8.34A):
One real pole at \(z = \alpha\) on real axis.
One zero at \(z = -1\) to force zero gain at Nyquist \(f_s/2\) .
Approximate derivation:
DC magnitude:
\[
\left|H(e^{j0})\right|
= \frac{\text{dist from }1 \text{ to } -1}{\text{dist from }1 \text{ to }\alpha}
= \frac{2}{1 - \alpha}
\]
At 3‑dB cutoff, approximate distance geometry leads to:
\[
2\pi f_c T = 1 - \alpha
\]
Therefore, pole location:
\[
\alpha = 1 - 2\pi \frac{f_c}{f_s}
\]
Valid when \(f_c < f_s/4\) and \(\alpha \approx 0.9\,\text{to}\,1\) .
Design formulas – Lowpass (case 1):
If \(f_c < f_s/4\) :
\[
\alpha \approx 1 - 2\pi\frac{f_c}{f_s},\quad 0.9 \le \alpha < 1
\]
Transfer function:
\[
H(z) = \frac{K (z + 1)}{z - \alpha},\quad K = \frac{1 - \alpha}{2}
\]
Geometric view: - At DC, distance to zero (\(-1\) ) is 2; at the pole, it is \(1-\alpha\) . - At \(f_c\) , the magnitude is down by \(1/\sqrt{2}\) relative to DC.
This is an approximate design , good enough for simple smoothing filters or control loop filters.
First‑Order Lowpass – Case 2: \(f_c > f_s/4\)
When the cutoff frequency is above \(f_s/4\) , we reposition the pole near \(z = -1\) (Fig. 8.35).
Approximate design formula:
Transfer function is still:
\[
H(z) = \frac{K(z + 1)}{z - \alpha},\quad K = \frac{1 - \alpha}{2}
\]
Intuition: we want the passband to extend closer to Nyquist, so the pole moves closer to \(z = -1\) , and the zero at \(-1\) now plays a different role. This is less common in practice; often designers will switch to a more systematic IIR design or use a different sampling rate. But this formula is useful if you are heavily constrained and need a simple 1st‑order design.
Example 8.19 – First‑Order Lowpass
Specifications:
Sampling rate: \(f_s = 8000\ \text{Hz}\)
3‑dB cutoff frequency: \(f_c = 100\ \text{Hz}\)
Zero gain at 4000 Hz (Nyquist)
Since \(f_c = 100\ \text{Hz} \ll f_s/4 = 2000\ \text{Hz}\) , use case 1 formula:
\[
\alpha \approx 1 - 2\pi\frac{100}{8000} = 0.9215
\]
Scale factor:
\[
K = \frac{1 - \alpha}{2} = \frac{1 - 0.9215}{2} = 0.03925
\]
Transfer function:
\[
H(z) = \frac{0.03925(z + 1)}{z - 0.9215}
= \frac{0.03925 + 0.03925 z^{-1}}{1 - 0.9215 z^{-1}}
\]
Alternative way to compute \(K\) :
DC gain of unscaled filter:
\[
\text{DC gain} = \frac{z+1}{z-0.9215}\Bigg|_{z=1}
= \frac{2}{1 - 0.9215} = 25.4777
\]
Set \(K = 1 / 25.4777 = 0.03925\) .
Highlight that verifying gain via \(H(1)\) is a very general trick for lowpass filters. Ask students which property of the filter response the numerator \((z+1)\) is enforcing (zero at Nyquist).
Also show how to derive the time‑domain recursion: \(y(n) = -0.9215 y(n-1) + 0.03925 x(n) + 0.03925 x(n-1)\) .
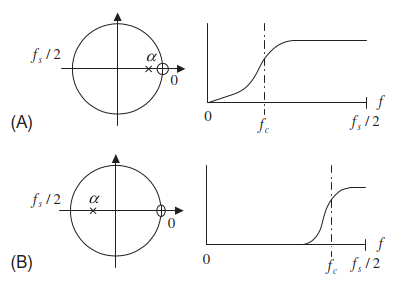
8.7.4 First‑Order Highpass Filter
Very similar structure, but we swap the location of the zero:
Zero at \(z = 1\) → kills DC .
Pole at \(z = \alpha\) on real axis.
Two cases again:
If \(f_c < f_s/4\) , then \(\alpha \approx 1 - 2\pi\frac{f_c}{f_s}\) , \(0.9 \le \alpha < 1\) .
If \(f_c > f_s/4\) , then \(\alpha \approx -\left(1 - \pi + 2\pi \frac{f_c}{f_s}\right)\) , \(-1 < \alpha \le -0.9\) .
Transfer function:
\[
H(z) = \frac{K(z - 1)}{z - \alpha},\quad
K = \frac{1 + \alpha}{2}
\]
Compare with lowpass:
Lowpass: zero at \(z=-1\) , numerator \((z+1)\) .
Highpass: zero at \(z=1\) , numerator \((z-1)\) .
Remind students that \(z=1\) on the unit circle corresponds to \(\Omega = 0\) (DC), and \(z=-1\) corresponds to \(\Omega = \pi\) (Nyquist). Thus, by choosing where to place zeros, we can control which extreme of the spectrum is attenuated.
Example 8.20 – First‑Order Highpass
Specifications:
Sampling rate: \(f_s = 8000\ \text{Hz}\)
3‑dB cutoff frequency: \(f_c = 3800\ \text{Hz}\)
Zero gain at 0 Hz (DC)
Since \(f_c = 3800\ \text{Hz} > f_s/4 = 2000\ \text{Hz}\) , use highpass case 2 formula:
\[
\alpha \approx -\left(1 - \pi + 2\pi\frac{3800}{8000}\right) = -0.8429
\]
Scale factor (note: the text appears to have a minor sign typo):
The correct highpass formula is typically:
\[
K = \frac{1 + \alpha}{2} = \frac{1 - 0.8429}{2} = 0.07855\ (\text{approx})
\]
Transfer function:
\[
H(z) = \frac{0.07854(z - 1)}{z + 0.8429}
= \frac{0.07854 - 0.07854 z^{-1}}{1 + 0.8429 z^{-1}}
\]
Alternative: enforce unity gain at Nyquist (\(z = -1\) ):
Ask students: - How does this differ from the lowpass example structurally? - What is the time‑domain recursion?
\(y(n) = -0.8429 y(n-1) + 0.07854 x(n) - 0.07854 x(n-1)\) .
Also, connect this to applications like DC blocking in audio or biomedical signals.
Example 8.21 – MATLAB Implementation (2/2)
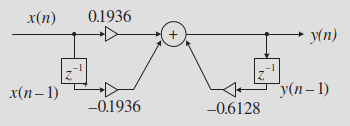
Program 8.14 implements Direct‑Form I manually:
sample = 2 : 2 : 20 ; % Input test array x = [0 0 ]; % Input buffer [x(n) x(n-1)] y = [0 0 ]; % Output buffer [y(n) y(n-1)] b = [0.1936 - 0.1936 ]; % Numerator coefficients a = [1 0.6128 ]; % Denominator coefficients for n = 1 : 1 : length (sample )% Shift buffers for k = 2 :- 1 : 2 x (k ) = x (k - 1 ); y (k ) = y (k - 1 ); end x (1 ) = sample (n ); y (1 ) = 0 ; % Initialize output % FIR (feedforward) part for k = 1 : 1 : 2 y (1 ) = y (1 ) + x (k )* b (k ); end % IIR (feedback) part for k = 2 : 2 y (1 ) = y (1 ) - a (k )* y (k ); end out (n ) = y (1 ); end out
In practice, you rarely write this loop manually. You use:
out = filter (b , a , sample );
This code is mainly pedagogical, showing how the delay buffers implement the recursion. It’s a good exercise to trace the first few iterations by hand to verify that the code matches the difference equation. Also stress that a(1) is assumed to be 1 (normalized).
Example 8.22 – MATLAB Implementation (2/2)
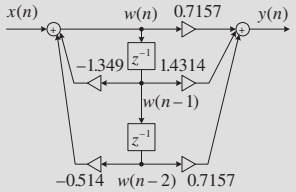
Program 8.15 manually implements Direct‑Form II:
sample = 2 : 2 : 20 ; % Input test array x = [0 ]; % Input buffer [x(n)] y = [0 ]; % Output buffer [y(n)] w = [0 0 0 ]; % Internal states [w(n) w(n-1) w(n-2)] b = [0.7157 1.4314 0.7157 ]; % Numerator coefficients a = [1 1.3490 0.5140 ]; % Denominator coefficients for n = 1 : 1 : length (sample )% Shift w(n) states for k = 3 :- 1 : 2 w (k ) = w (k - 1 ); end x (1 ) = sample (n ); % IIR (feedback) stage: compute w(n) w (1 ) = x (1 ); for k = 2 : 1 : 3 w (1 ) = w (1 ) - a (k )* w (k ); end % FIR (feedforward) stage: compute y(n) y (1 ) = 0 ; for k = 1 : 1 : 3 y (1 ) = y (1 ) + b (k )* w (k ); end out (n ) = y (1 ); end out Again, this is equivalent to:
out = filter (b , a , sample );
Highlight that here \(w(n)\) is the state vector of the filter, and this structure maps well to hardware implementations. Ask students which form (direct I vs direct II) is more memory‑efficient and which might be more numerically robust.
This sets up the next topic: cascade realizations , which use multiple biquads.
Example 8.23 – Cascade Realization (2/2)
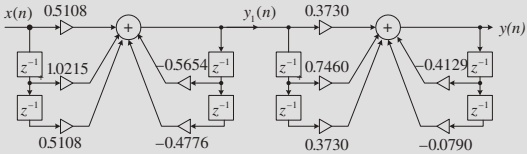
Direct‑Form I cascade (Fig. 8.39):
Difference equations – first section:
\[
\begin{aligned}
y_1(n)
&= -0.5654 y_1(n-1) - 0.4776 y_1(n-2) \\
&\quad + 0.5108 x(n) + 1.0215 x(n-1) + 0.5108 x(n-2)
\end{aligned}
\]
Second section:
\[
\begin{aligned}
y(n)
&= -0.4129 y(n-1) - 0.0790 y(n-2) \\
&\quad + 0.3730 y_1(n) + 0.7460 y_1(n-1) + 0.3730 y_1(n-2)
\end{aligned}
\]
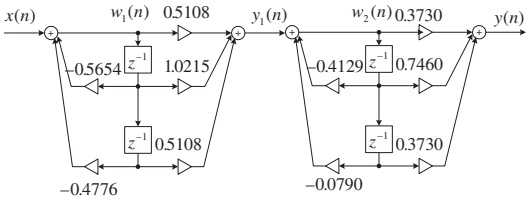
Direct‑Form II cascade (Fig. 8.40) just replaces each second‑order block with its DF‑II implementation:
In both cases, output of section 1 (\(y_1(n)\) or \(w_1\) outputs) becomes input to section 2 .
Connect this to real practice: - MATLAB’s tf2sos or zp2sos functions factor a high‑order filter into second‑order sections. - Good implementations then apply section scaling and use DF‑II transposed for each biquad.
Ask students why we prefer multiple 2nd‑order sections rather than one giant 4th‑order section: - Numerical stability, easier debugging, modular design.
Second‑Order Bandpass – Pole–Zero Placement
Center frequency angle:
\[
\theta = \left(\frac{f_0}{f_s}\right) 360^\circ
\]
Pole radius (narrowband approximation):
\[
r \approx 1 - \pi\frac{BW_{3\text{dB}}}{f_s},\quad 0.9 \le r < 1
\]
Transfer function:
\[
H(z) = \frac{K(z^2 - 1)}{z^2 - 2 r z\cos\theta + r^2}
\]
Gain factor:
\[
K = \frac{(1 - r)\sqrt{1 - 2 r\cos(2\theta) + r^2}}{2|\sin\theta|}
\]
Second‑Order Bandstop (Notch) – Pole–Zero Placement
Angle:
\[
\theta = \left(\frac{f_0}{f_s}\right) 360^\circ
\]
Pole radius:
\[
r \approx 1 - \pi\frac{BW_{3\text{dB}}}{f_s},\quad 0.9 \le r < 1
\]
Transfer function:
\[
H(z) = \frac{K(z^2 - 2 z\cos\theta + 1)}{z^2 - 2 r z\cos\theta + r^2}
\]
Gain factor:
\[
K = \frac{1 - 2 r\cos\theta + r^2}{2 - 2\cos\theta}
\]
First‑Order Lowpass – Pole–Zero Placement
Case 1: \(f_c < f_s/4\) :
\[
\alpha \approx 1 - 2\pi\frac{f_c}{f_s},\quad 0.9 \le \alpha < 1
\]
Case 2: \(f_c > f_s/4\) :
\[
\alpha \approx -(1 - \pi + 2\pi\frac{f_c}{f_s}),\quad -1 < \alpha \le -0.9
\]
Transfer function:
\[
H(z) = \frac{K(z + 1)}{z - \alpha},\quad K = \frac{1 - \alpha}{2}
\]
First‑Order Highpass – Pole–Zero Placement
Case 1: \(f_c < f_s/4\) :
\[
\alpha \approx 1 - 2\pi\frac{f_c}{f_s},\quad 0.9 \le \alpha < 1
\]
Case 2: \(f_c > f_s/4\) :
\[
\alpha \approx -(1 - \pi + 2\pi\frac{f_c}{f_s}),\quad -1 < \alpha \le -0.9
\]
Transfer function:
\[
H(z) = \frac{K(z - 1)}{z - \alpha},\quad K = \frac{1 + \alpha}{2}
\]
Realization Structures
Generic IIR:
\[
H(z) = \frac{\sum_{k=0}^{M} b_k z^{-k}}{1 + \sum_{k=1}^{N} a_k z^{-k}}
\]
Direct‑Form I difference equation:
\[
y(n) = -\sum_{k=1}^{N} a_k y(n-k) + \sum_{k=0}^{M} b_k x(n-k)
\]
Direct‑Form II intermediate state:
\[
\begin{aligned}
w(n) &= x(n) - \sum_{k=1}^{N} a_k w(n-k) \\
y(n) &= \sum_{k=0}^{M} b_k w(n-k)
\end{aligned}
\]
Cascade form:
\[
H(z) = \prod_{i=1}^M H_i(z),\quad \text{each }H_i(z)\text{ second order}
\]
Encourage students to keep this summary page handy as a “formula sheet” for homework or projects on IIR filters. Next steps in the course will typically combine these methods with formal design via Butterworth/Chebyshev analog prototypes and the bilinear transform.
8.6–8.8 IIR Filters – Interactive Deck
Getting Started
This interactive deck lets you:
Experiment with impulse invariant design in Python.
Explore how poles and zeros affect frequency responses.
See how realization structures map from equations to code.
All the Python examples run in your browser via Pyodide (WebAssembly). You can edit the code and re‑run to immediately see the effect.
Remind students that everything here runs locally in the browser—no server needed. Encourage them to deliberately “break” things (change parameters wildly) to see stability issues and aliasing.
1. Impulse Invariant – First‑Order Example (H(s) = 2/(s+2))
Use this cell to:
Change the analog pole (currently at \(s=-2\) ).
Change the sampling rate \(f_s\) .
See how the digital pole and \(H(z)\) coefficients change.
Ask students to: - Increase fs and observe how the digital pole changes. - Compare z_p = e^{-aT} to the analog pole \(-a\) . - Explain why smaller \(T\) (larger fs) yields a pole closer to 1 , and what that implies for the time constant of the digital response.
2. Impulse Invariant – Compare Analog vs Digital Magnitude (Interactive)
Use a reactive slider for sampling rate and see how the digital magnitude response changes relative to a fixed analog filter.
Analog prototype: - \(H(s) = \dfrac{2}{s+2}\)
We’ll:
Fix the analog filter.
Let you change fs interactively.
Plot analog and digital magnitudes over frequency in Hz.
= Inputs. range ([8 , 64 ], {step : 2 , label : "Sampling rate fs (Hz)" })
3. Impulse Invariant – Second‑Order Example (H(s) = s/(s² + 2s + 5))
Now work with the second‑order bandpass‐like analog filter:
\[
H(s) = \frac{s}{s^2 + 2s + 5}
\]
We’ll:
Derive the digital coefficients symbolically (as in Example 8.16).
Let you change the sampling rate fs .
See how the digital pole locations move.
This snippet focuses on how the discrete poles depend on fs. You can ask students to:
Increase fs and see how the poles move closer to the unit circle (for a fixed analog damping).
Reason what happens to the discrete‑time resonance .
They can later compute the actual poles with np.roots([1, -a1, a2]) if desired.
4. Pole–Zero Placement – Interactive Bandpass Design
Use the bandpass formulas from Section 8.7.1 interactively:
Choose center frequency \(f_0\) .
Choose 3‑dB bandwidth \(BW\) .
Observe the resulting frequency response and approximate pole radius \(r\) .
= Inputs. range ([200 , 3000 ], {step : 100 , value : 1000 , label : "Center frequency f0 (Hz)" })= Inputs. range ([50 , 1000 ], {step : 50 , value : 200 , label : "3-dB bandwidth BW (Hz)" })= Inputs. range ([4000 , 16000 ], {step : 1000 , value : 8000 , label : "Sampling rate fs (Hz)" })
Prompts for students:
How does increasing BW affect the pole radius r and the width of the passband?
What happens if you push f0 close to Nyquist (fs/2)?
For which ranges of r do you expect numerical stability issues (hint: \(|r|<1\) but too close to 1 may cause sensitivity)?
5. Pole–Zero Placement – Interactive Notch (Bandstop)
Here, we implement the notch filter from Section 8.7.2.
Slide the notch frequency \(f_0\) .
Adjust the bandwidth to see a wider or narrower notch.
= Inputs. range ([200 , 3500 ], {step : 100 , value : 1500 , label : "Notch center f0 (Hz)" })= Inputs. range ([20 , 400 ], {step : 20 , value : 100 , label : "3-dB bandwidth BW (Hz)" })= Inputs. range ([4000 , 16000 ], {step : 1000 , value : 8000 , label : "Sampling rate fs (Hz)" })
Discussion points:
Show that the notch occurs at \(f_0\) (where magnitude is near zero).
Narrower BW → larger r → poles closer to the unit circle → sharper, deeper notch but more sensitive numerically.
Typical application: removing powerline interference at 50/60 Hz from biomedical signals.
6. First‑Order Lowpass – Interactive Design (Pole at α)
Use the first‑order lowpass formulas from Section 8.7.3.
We’ll let you:
Set cutoff frequency \(f_c\) .
Compute \(\alpha\) automatically (case \(f_c < f_s/4\) ).
Visualize the magnitude response.
= Inputs. range ([10 , 1000 ], {step : 10 , value : 100 , label : "Lowpass 3-dB cutoff fc (Hz)" })= Inputs. range ([4000 , 16000 ], {step : 1000 , value : 8000 , label : "Sampling rate fs (Hz)" })
Ask students:
As fc increases (still < fs/4), how does alpha change?
Why does alpha approaching 1 mean a slower lowpass (longer memory)?
Check that the magnitude at fc is roughly -3 dB .
Try fs=8000, fc=100 to recover something close to Example 8.19.
7. First‑Order Highpass – Interactive Design (Pole at α)
Similarly for first‑order highpass (Section 8.7.4):
Zero at \(z=1\) (kill DC).
Pole at \(\alpha\) (real).
= Inputs. range ([50 , 3800 ], {step : 50 , value : 3800 , label : "Highpass 3-dB cutoff fc (Hz)" })= Inputs. range ([4000 , 16000 ], {step : 1000 , value : 8000 , label : "Sampling rate fs (Hz)" })
Prompts:
Verify that at low frequencies, the magnitude is strongly attenuated (highpass behavior).
For fc near Nyquist (as in Example 8.20), check how the shape compares.
Discuss why the fc > fs/4 case uses a different formula for \(\alpha\) , and what happens if you naively use the wrong formula.
10. Reflection – What Did You Observe?
Use these questions to consolidate learning:
How does changing sampling rate in the impulse invariant method affect:
The location of the digital pole(s)?
The closeness of analog and digital magnitude responses?
In pole–zero placement:
How do radius \(r\) and angle \(\theta\) shape the filter type and bandwidth?
Why do we place zeros at DC or Nyquist for lowpass/highpass?
In realization:
How do Direct‑Form I and Direct‑Form II differ structurally?
Why might we prefer a cascade of second‑order sections in practice?
You can use this slide for an in‑class poll or quick written reflection. Ask 1–2 students to summarize (verbally) how they would go from:
Analog spec → choose method (impulse invariant vs BLT) → derive H(z) → choose implementation form.
Reinforce that mastering these connections is the main learning goal for this chapter.