7.1 FIR Filter Design: Format, Fourier Design, and Windows
Digital Signal Processing
Transfer function:
\[
H(z) = \frac{Y(z)}{X(z)} = 0.1 + 0.25 z^{-1} + 0.2 z^{-2}.
\]
Filter length:
There are 3 taps ⇒ \(K+1 = 3 \Rightarrow K = 2\) .
Coefficients:
\(b_0 = 0.1,\; b_1 = 0.25,\; b_2 = 0.2\) .
Impulse response (inverse \(z\) -transform):
\[
h(n) = 0.1 \delta(n) + 0.25 \delta(n-1) + 0.2 \delta(n-2).
\]
Emphasize correspondence:
Coefficients \(b_i\) ↔︎ samples of \(h(n)\) .
Impulse response is just “what comes out when input is a discrete-time delta.”
Ask: is this filter stable? Yes, because \(h(n)\) is finite.
Real-world ECE uses:
Audio equalizers, crossover networks (linear phase is important).
Baseband pulse shaping and matched filters in digital communication.
Anti-aliasing / reconstruction filters when constraints on phase are tight.
For many audio and communication applications, FIR is preferred even when it’s more expensive computationally, because of predictable phase and unconditional stability.
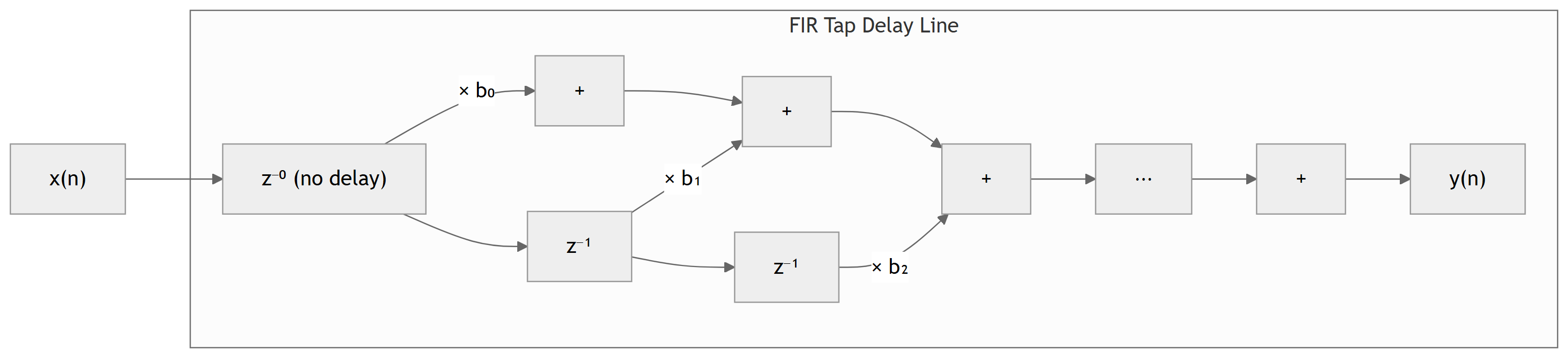
Visual: FIR Filter as a Tap Delay Line
Use this diagram to reinforce that FIR is just:
Shift register (delays)
Multipliers by coefficients
Adders
Easy mapping to FPGA or DSP processor implementation.
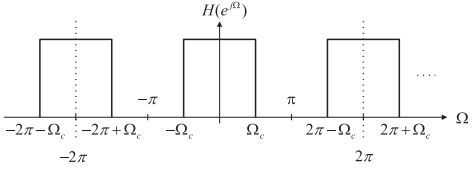
Ideal Lowpass – Periodic Extension
Because \(H(e^{j\Omega})\) is \(2\pi\) -periodic, we can extend it beyond \(-\pi\) to \(\pi\) :
Idea:
View \(H(e^{j\Omega})\) as a periodic function of \(\Omega\) .
Then express it as a Fourier series in \(\Omega\) .
The Fourier series coefficients in \(\Omega\) -domain will turn out to be the impulse response \(h(n)\) .
Frequency-Domain Fourier Series Representation
Write the periodic spectrum as a complex Fourier series in \(\Omega\) :
\[
H(e^{j\Omega}) = \sum_{n=-\infty}^{\infty} c_n e^{-j \omega_0 n \Omega}.
\]
Fourier series coefficients:
\[
c_n = \frac{1}{2\pi} \int_{-\pi}^{\pi} H(e^{j\Omega}) e^{j \omega_0 n \Omega} \, d\Omega.
\]
For our case, the period is \(2\pi\) , so:
\[
\omega_0 = \frac{2\pi}{2\pi} = 1.
\]
So the series simplifies to:
\[
H(e^{j\Omega}) = \sum_{n=-\infty}^{\infty} c_n e^{-j n \Omega}.
\]
Define \(h(n) = c_n\) ⇒
\[
H(e^{j\Omega}) = \sum_{n=-\infty}^{\infty} h(n) e^{-j n \Omega}.
\]
and the corresponding “inverse” formula:
\[
h(n) = \frac{1}{2\pi} \int_{-\pi}^{\pi} H(e^{j\Omega}) e^{j n \Omega} \, d\Omega.
\]
This is just the DTFT pair : - \(H(e^{j\Omega}) \leftrightarrow h(n)\) . - Except here, we are thinking of using it as a design formula to derive the ideal impulse response from the desired magnitude response.
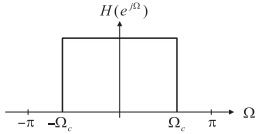
Ideal Lowpass – Desired (Infinite) Impulse Response
Apply the formula
\[
h(n) = \frac{1}{2\pi} \int_{-\pi}^{\pi} H(e^{j\Omega}) e^{j n \Omega} \, d\Omega
\]
with \(H(e^{j\Omega}) = 1\) for \(|\Omega|\le \Omega_c\) and 0 otherwise.
For \(n = 0\) :
\[
\begin{aligned}
h(0)
&= \frac{1}{2\pi} \int_{-\pi}^{\pi} H(e^{j\Omega})\, d\Omega \\
&= \frac{1}{2\pi} \int_{-\Omega_c}^{\Omega_c} 1 \, d\Omega \\
&= \frac{\Omega_c}{\pi}.
\end{aligned}
\]
For \(n \ne 0\) :
\[
\begin{aligned}
h(n)
&= \frac{1}{2\pi} \int_{-\Omega_c}^{\Omega_c} e^{j n \Omega} \, d\Omega \\
&= \frac{1}{2\pi} \left[ \frac{e^{j n \Omega}}{j n} \right]_{-\Omega_c}^{\Omega_c} \\
&= \frac{1}{\pi n} \cdot \frac{e^{j n \Omega_c} - e^{-j n \Omega_c}}{2j} \\
&= \frac{\sin(\Omega_c n)}{\pi n}.
\end{aligned}
\]
So the ideal lowpass impulse response is:
\[
h(n) =
\begin{cases}
\dfrac{\Omega_c}{\pi}, & n = 0, \\
\dfrac{\sin(\Omega_c n)}{\pi n}, & n \neq 0.
\end{cases}
\]
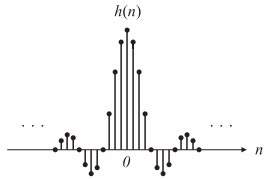
Ideal Lowpass Impulse Response Shape
Observations:
\(h(n)\) is infinite-length (exists for all integer \(n\) ).Symmetric around \(n = 0\) : \(h(n) = h(-n)\) .
Amplitude decays roughly like \(1/|n|\) .
This is essentially a discrete-time sinc function:
\[
h(n) \propto \frac{\sin(\Omega_c n)}{n}.
\]
Connect to continuous-time sinc used for ideal lowpass filter in analog and in sampling/reconstruction theory.
Mention that evenness of \(H(e^{j\Omega})\) (symmetry in frequency) leads to a real, even impulse response \(h(n)\) .
Summary Table for Ideal FIR Impulse Responses
Table 7.1 (noncausal ideal coefficients \(h(n)\) , \(-M \le n \le M\) ):
Lowpass
\(h(0) = \dfrac{\Omega_c}{\pi}\) and \(h(n) = \dfrac{\sin(\Omega_c n)}{n\pi},\; n\neq 0\)
Highpass
\(h(0) = \dfrac{\pi - \Omega_c}{\pi}\) and \(h(n) = -\dfrac{\sin(\Omega_c n)}{n\pi},\; n\neq 0\)
Bandpass
\(h(0) = \dfrac{\Omega_H - \Omega_L}{\pi}\) and \(h(n) = \dfrac{\sin(\Omega_H n)}{n\pi} - \dfrac{\sin(\Omega_L n)}{n\pi},\; n\neq 0\)
Bandstop
\(h(0) = \dfrac{\pi - \Omega_H + \Omega_L}{\pi}\) and \(h(n) = -\dfrac{\sin(\Omega_H n)}{n\pi} + \dfrac{\sin(\Omega_L n)}{n\pi},\; n\neq 0\)
Then make it causal by shifting: \(b_n = h(n-M)\) .
Point out that all these formulas come from applying the inverse DTFT to the appropriate ideal magnitude response (rectangular in some band).
This table is central: highlight that design = choose type + choose band edges + choose M .
Example 7.2 – 3-Tap Lowpass by Fourier Design
Goal: Design a 3-tap (\(2M+1=3\) ⇒ \(M=1\) ) lowpass FIR with:
\(f_c = 800\) Hz, \(f_s = 8000\) Hz.
(a) Coefficients via Fourier method
Normalized cutoff:
\[
\Omega_c = 2\pi \frac{f_c}{f_s} = 2\pi \frac{800}{8000} = 0.2\pi \; \text{rad}.
\]
From the lowpass formula:
\[
h(0) = \frac{\Omega_c}{\pi} = 0.2,
\quad
h(1) = \frac{\sin(0.2\pi)}{\pi} \approx 0.1871,
\quad
h(-1) = h(1) = 0.1871.
\]
Shift by \(M=1\) to get causal coefficients:
\[
\begin{aligned}
b_0 &= h(-1) = 0.1871, \\
b_1 &= h(0) = 0.2, \\
b_2 &= h(1) = 0.1871.
\end{aligned}
\]
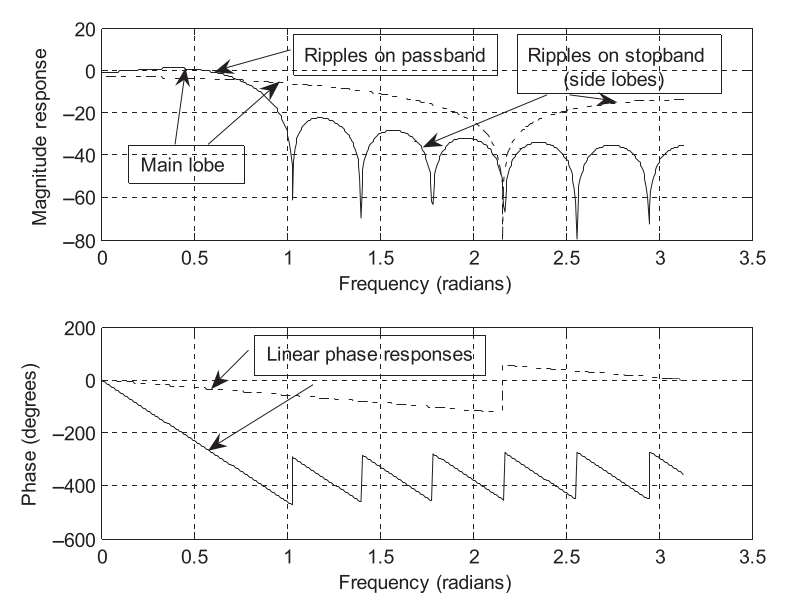
Main slope of phase: \(-\Omega\) ⇒ linear phase with delay \(M=1\) .
Occasional \(\pi\) jumps when term in parentheses changes sign (sawtooth pattern).
For an FIR with symmetric coefficients and odd length \(2M+1\) :
\[
\angle H(e^{j\Omega}) \approx -M \Omega
\quad (\text{plus possible }180^\circ \text{ jumps}).
\]
⇒ Constant group delay \(M\) samples for all passband frequencies.
Visual: 3-Tap vs 17-Tap Lowpass Filters
Gibbs Effect – Why Ripples Appear
The passband and stopband ripples in ideal-based FIR design come from:
Abrupt truncation of the infinite impulse response.
Analogy:
Truncating a continuous-time sinc (multiplying by a rectangular window) produces ripples in frequency.
In our discrete-time design:
Multiplying the ideal infinite \(h(n)\) by a finite-length rectangular window in time ⇒ convolution with sinc-like main/side lobes in frequency ⇒ ripples (Gibbs).
We will reduce these ripples by using smoother windows (Hanning, Hamming, Blackman, etc.) instead of the abrupt rectangular window.
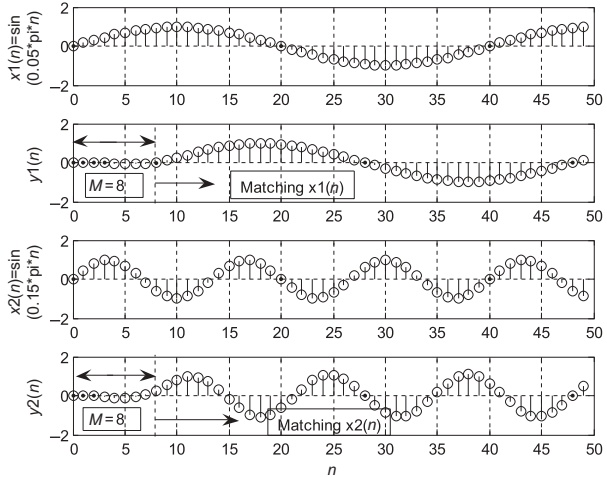
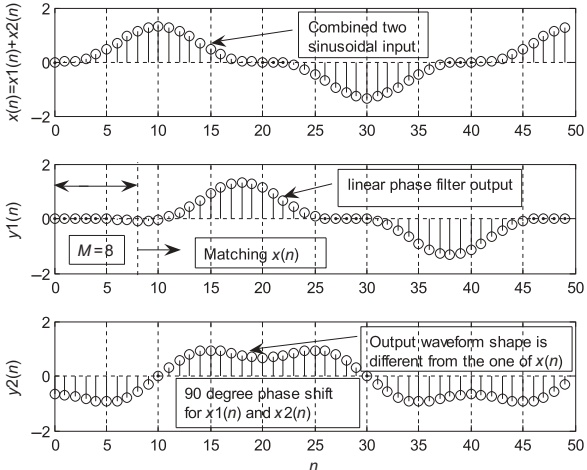
For a sum of sinusoids within the passband, all components get same delay ⇒ waveform shape is preserved ⇒ no phase distortion.
In audio: nonlinear phase can make transients smeared or “hollow” sounding ⇒ FIR linear-phase filters are desirable.
Example 7.3 – 5-Tap Bandpass Filter
Specs:
\(f_L = 2000\) Hz, \(f_H = 2400\) Hz, \(f_s = 8000\) Hz.5 taps ⇒ \(2M+1 = 5\) ⇒ \(M = 2\) .
Normalized edges:
\[
\Omega_L = 2\pi \frac{2000}{8000} = 0.5\pi,
\quad
\Omega_H = 2\pi \frac{2400}{8000} = 0.6\pi.
\]
Ideal bandpass impulse (noncausal):
\[
h(0) = \frac{\Omega_H - \Omega_L}{\pi} = 0.1.
\]
\[
h(1) = \frac{\sin(0.6\pi)}{\pi} - \frac{\sin(0.5\pi)}{\pi} \approx -0.01558,
\]
\[
h(2) = \frac{\sin(1.2\pi)}{2\pi} - \frac{\sin(\pi)}{2\pi} \approx -0.09355,
\]
with symmetry:
\[
h(-1)=h(1),\quad h(-2)=h(2).
\]
Shift by \(M=2\) :
\[
b_0 = b_4 = -0.09355,
\quad
b_1 = b_3 = -0.01558,
\quad
b_2 = 0.1.
\]
Transfer function:
\[
H(z) = -0.09355 - 0.01558 z^{-1} + 0.1 z^{-2} - 0.01558 z^{-3} - 0.09355 z^{-4}.
\]
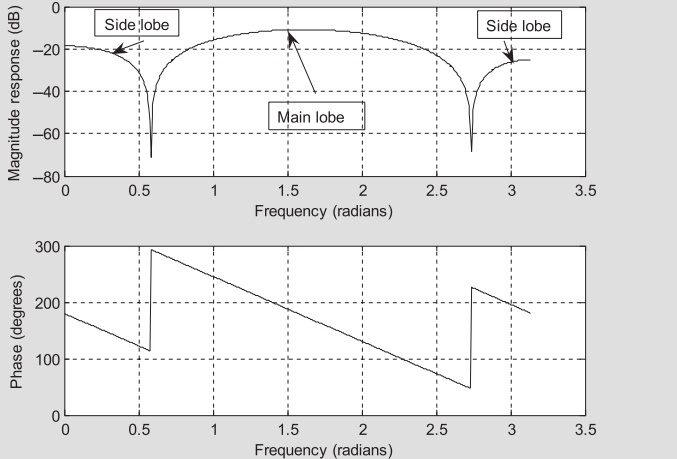
Example 7.3 – Observing Gibbs in Bandpass
MATLAB frequency response (Program 7.1) gives:
Observations:
Passband peak is ~\(-10\) dB instead of 0 dB.
Stopband side lobes swing between roughly -18 and -70 dB (lower) and -25 and -68 dB (upper).
This is again Gibbs oscillation , due to abrupt truncation.
Fix: Window the impulse response instead of raw truncation.
7.3 Window Method – Motivation
We know:
Truncating the ideal, infinite \(h(n)\) with a rectangular window (just cutting off) gives Gibbs ripples.
Idea:
Replace sharp truncation with smoother weighting that tapers to zero at the ends.
Mathematically:
\[
h_w(n) = h(n)\, w(n),
\]
where \(w(n)\) is a window function, nonzero for \(-M \le n \le M\) , symmetric around 0.
Effect in frequency:
Convolution of ideal response with window’s spectrum.
Tapered windows reduce side lobes (ripples) but broaden main lobe (wider transition).
Rectangular: abrupt edges.
Others: smooth taper to zero at ends.
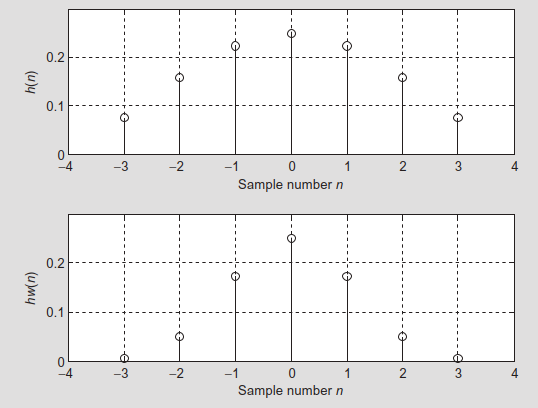
Example 7.4 – Applying Hamming Window to FIR Coefficients
Given noncausal symmetric coefficients (ideal lowpass):
\[
h(0)=0.25,\; h(\pm1)=0.22508,\; h(\pm2)=0.15915,\; h(\pm3)=0.07503.
\]
Use Hamming window with \(M=3\) :
Window values:
\[
\begin{aligned}
w_{\text{ham}}(0) &= 0.54 + 0.46 \cos(0) = 1.0, \\
w_{\text{ham}}(\pm 1) &= 0.77, \\
w_{\text{ham}}(\pm 2) &= 0.31, \\
w_{\text{ham}}(\pm 3) &= 0.08.
\end{aligned}
\]
Windowed coefficients:
\[
\begin{aligned}
h_w(0) &= 0.25 \times 1 = 0.25, \\
h_w(\pm1) &= 0.22508 \times 0.77 \approx 0.17331, \\
h_w(\pm2) &= 0.15915 \times 0.31 \approx 0.04934, \\
h_w(\pm3) &= 0.07503 \times 0.08 \approx 0.00600.
\end{aligned}
\]
Observation: coefficients are smoothly tapered toward zero ⇒ reduced Gibbs ripples.
Example 7.5 – 3-Tap Lowpass with Hamming Window
Same spec as Example 7.2:
\(f_c = 800\) Hz, \(f_s = 8000\) Hz ⇒ \(\Omega_c = 0.2\pi\) .\(2M+1 = 3\) ⇒ \(M = 1\) .
Ideal coefficients (from Example 7.2):
\[
h(0) = 0.2,\quad h(\pm1) = 0.1871.
\]
Hamming window (for \(M=1\) ):
\[
w_{\text{ham}}(0) = 1,\quad w_{\text{ham}}(\pm1) = 0.08.
\]
Windowed noncausal coefficients:
\[
\begin{aligned}
h_w(0) &= 0.2 \times 1 = 0.2, \\
h_w(\pm 1) &= 0.1871 \times 0.08 \approx 0.01497.
\end{aligned}
\]
Shift by \(M=1\) :
\[
b_0 = b_2 = 0.01497,\quad b_1 = 0.2.
\]
Transfer function:
\[
H(z) = 0.01497 + 0.2 z^{-1} + 0.01497 z^{-2}.
\]
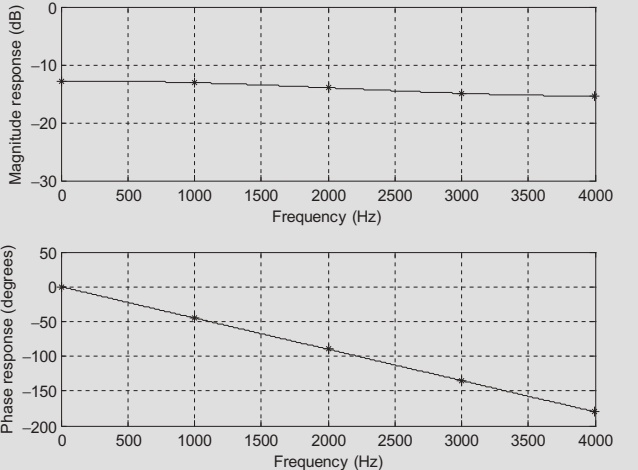
Example 7.5 – Frequency Response
Frequency response:
\[
H(e^{j\Omega}) = e^{-j\Omega}\big(0.2 + 0.02994\cos\Omega\big).
\]
Magnitude:
\[
|H(e^{j\Omega})| = \big|0.2 + 0.02994\cos\Omega\big|.
\]
Phase:
\[
\angle H(e^{j\Omega})=
\begin{cases}
-\Omega, & 0.2 + 0.02994\cos\Omega > 0, \\
-\Omega + \pi, & 0.2 + 0.02994\cos\Omega < 0.
\end{cases}
\]
Sample values (Table 7.4) show slightly reduced peak magnitude and less ripple compared to the unwindowed case.
Example 7.6 – 5-Tap Bandstop with Hamming Window
Specs:
Bandreject (notch) from 2000–2400 Hz.
\(f_s = 8000\) Hz.5 taps ⇒ \(M=2\) .
Ideal bandstop \(h(n)\) (Table 7.1):
\[
h(0) = \frac{\pi - \Omega_H + \Omega_L}{\pi} = 0.9,
\]
\[
h(1) \approx 0.01558, \quad h(2) \approx 0.09355,
\quad h(-1)=h(1),\; h(-2)=h(2).
\]
Hamming window (\(M=2\) ):
\[
w_{\text{ham}}(0) = 1,\quad w_{\text{ham}}(\pm1)=0.54,\quad w_{\text{ham}}(\pm2)=0.08.
\]
Windowed coefficients:
\[
\begin{aligned}
h_w(0) &= 0.9, \\
h_w(\pm1) &= 0.01558\times0.54\approx0.00841, \\
h_w(\pm2) &= 0.09355\times0.08\approx0.00748.
\end{aligned}
\]
Shift by \(M=2\) :
\[
b_0 = b_4 = 0.00748,\quad b_1 = b_3 = 0.00841,\quad b_2 = 0.9.
\]
Transfer function:
\[
H(z) = 0.00748 + 0.00841 z^{-1} + 0.9 z^{-2} + 0.00841 z^{-3} + 0.00748 z^{-4}.
\]
MATLAB Helper Function: firwd
For larger designs, we let MATLAB do the heavy lifting. Custom function:
B = firwd (N , Ftype , WnL , WnH , Wtype )
N: number of taps (must be odd).Ftype:
1 = lowpass
2 = highpass
3 = bandpass
4 = bandreject
WnL, WnH: lower and upper cutoff frequencies (in radians).
For lowpass: set WnH = 0, use WnL = Ω_c.
For highpass: set WnL = 0, use WnH = Ω_c.
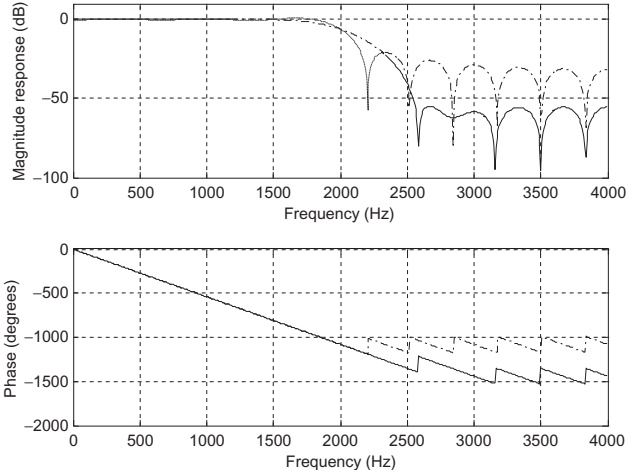
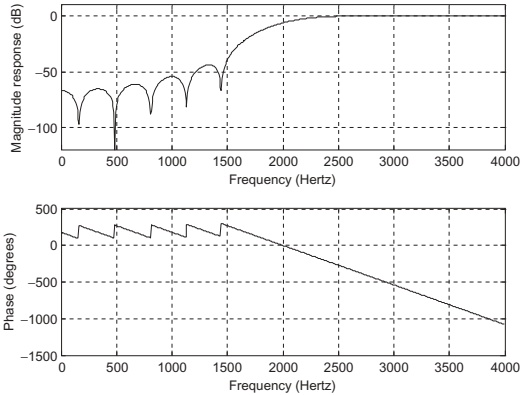
Example 7.7 – 25-Tap Lowpass: Rectangular vs Hamming
Specs:
Lowpass, \(f_c = 2000\) Hz, \(f_s = 8000\) Hz.
25 taps ⇒ \(M=12\) .
\(\Omega_c = 0.5\pi\) .
Use firwd twice:
Rectangular window (Wtype=1).
Hamming window (Wtype=4).
Magnitude responses:
Observations:
Rectangular: narrower transition but higher side lobes (~-21 dB).
Hamming: slightly wider transition but lower side lobes (~-53 dB).
Coefficients listed in Table 7.6.
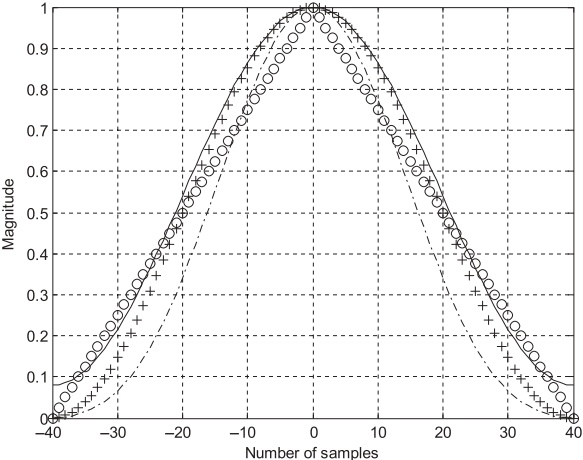
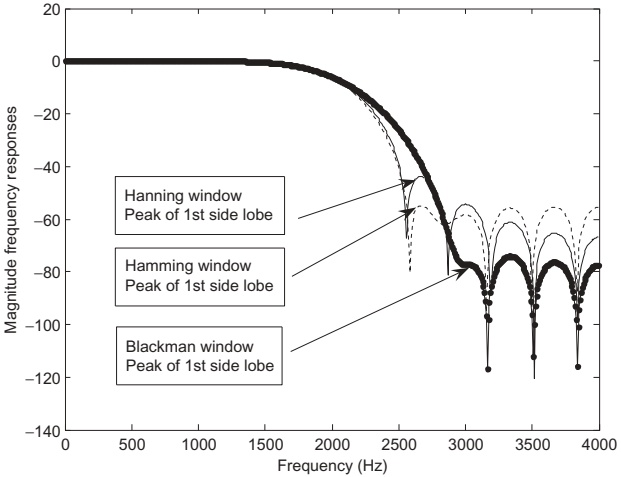
Comparing Hanning, Hamming, Blackman
For the same lowpass spec (25 taps, \(f_c=2000\) Hz):
Qualitative summary:
Hanning: medium main-lobe width, moderate side lobes (~-44 dB).Hamming: similar main-lobe width, lower side lobes (~-53 dB).Blackman: wider main lobe, very low side lobes (~-74 dB).
Trade-off:
Better stopband attenuation ⇒ more main-lobe widening (worse transition).
approximate length for each window:
Rectangular
\(1\) \(N \approx \dfrac{0.9}{\Delta f}\) 0.7416
21
Hanning
\(0.5+0.5\cos(\pi n/M)\) \(N \approx \dfrac{3.1}{\Delta f}\) 0.0546
44
Hamming
\(0.54+0.46\cos(\pi n/M)\) \(N \approx \dfrac{3.3}{\Delta f}\) 0.0194
53
Blackman
\(0.42+0.5\cos(\pi n/M)+0.08\cos(2\pi n/M)\) \(N \approx \dfrac{5.5}{\Delta f}\) 0.0017
74
Example 7.8 – Lowpass Length from Specs
Specs:
Passband: 0–1850 Hz.
Stopband: 2150–4000 Hz.
Stopband attenuation: 20 dB.
Passband ripple: 1 dB.
\(f_s = 8000\) Hz.
Compute normalized transition width:
\[
\Delta f = \frac{|2150 - 1850|}{8000} = 0.0375.
\]
Window choice:
Rectangular gives ~0.74 dB ripple and 21 dB stopband attenuation ⇒ meets the requirements (1 dB ripple, 20 dB attenuation).
Length estimate:
\[
N = \frac{0.9}{\Delta f} = \frac{0.9}{0.0375} \approx 24.
\]
Take odd \(N=25\) .
Design cutoff frequency:
\[
f_c = \frac{1850 + 2150}{2} = 2000 \; \text{Hz}.
\]
This is exactly the lowpass designed in Example 7.7.
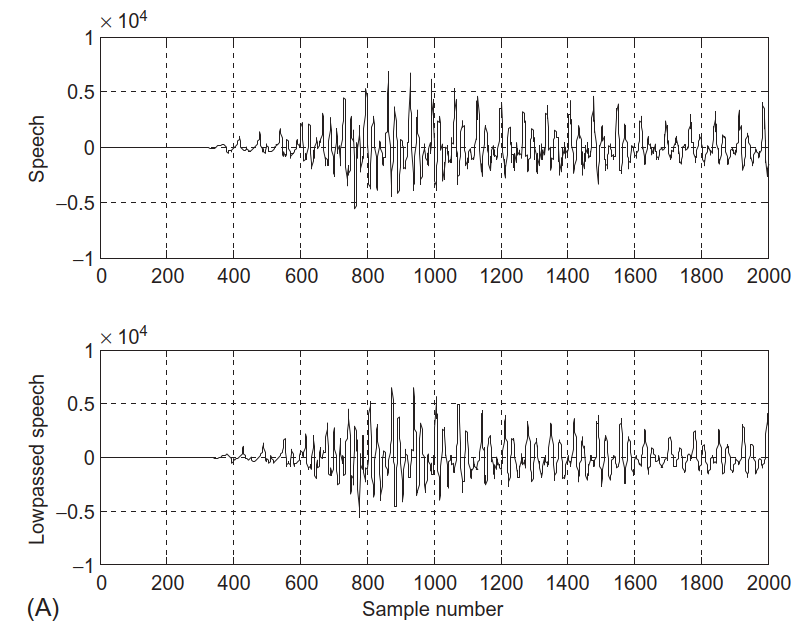
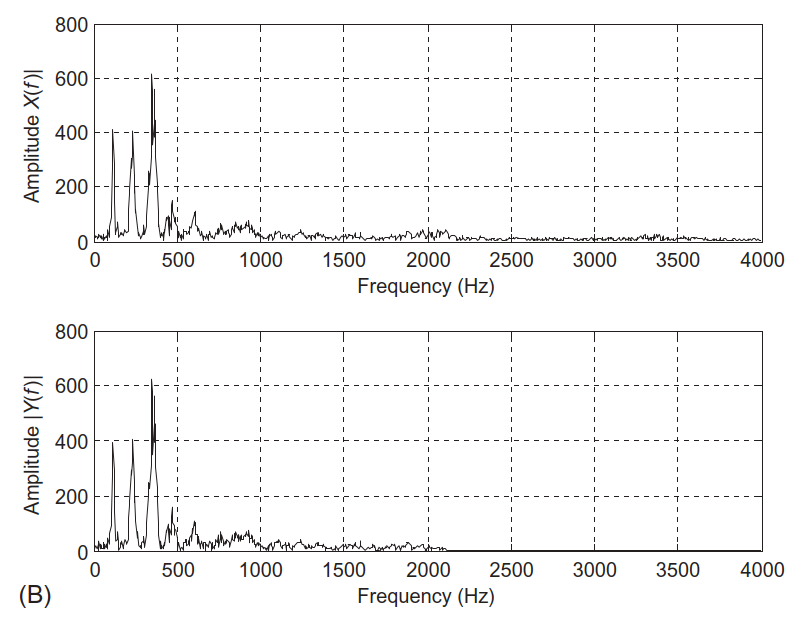
Example 7.8 – Effect on Speech
Apply this lowpass FIR to speech sampled at 8 kHz:
Perceptually:
Filtered speech sounds “muffled” because we removed higher harmonics and fricative energy.
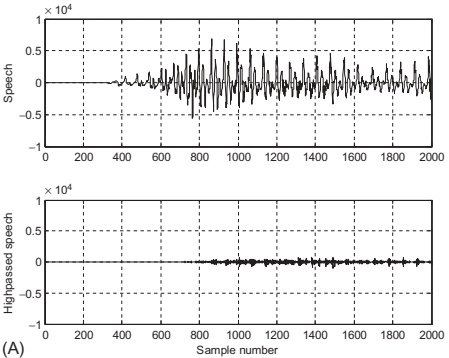
Example 7.9 – Highpass Filter from Specs
Specs:
Stopband: 0–1500 Hz.
Passband: 2500–4000 Hz.
Stopband attenuation: 40 dB.
Passband ripple: 0.1 dB.
\(f_s = 8000\) Hz.
Transition width:
\[
\Delta f = \frac{|2500 - 1500|}{8000} = 0.125.
\]
From Table 7.7:
Need stopband ∼ 40 dB and small ripple ⇒ Hanning (≈44 dB, 0.0546 dB ripple) is acceptable.
Length estimate:
\[
N = \frac{3.1}{0.125} = 24.8 \Rightarrow N=25.
\]
Cutoff frequency:
\[
f_c = \frac{1500+2500}{2} = 2000 \; \text{Hz},
\quad
\Omega_c = 0.5\pi.
\]
Use firwd(25, 2, 0, 0.5*pi, 3) to generate highpass coefficients.
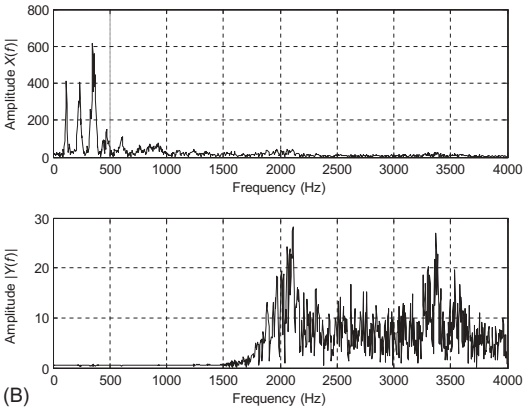
Example 7.9 – Effect on Speech
Frequency response:
Perceptually:
Speech sounds “crisp” or “thin”, emphasizing sibilants and consonant noise.
Example 7.10 – Bandpass Design from Specs
Specs:
Lower stopband: 0–500 Hz.
Passband: 1600–2300 Hz.
Upper stopband: 3500–4000 Hz.
Stopband attenuation: 50 dB.
Passband ripple: 0.05 dB.
\(f_s = 8000\) Hz.
Compute transition widths:
\[
\Delta f_1 = \frac{1600-500}{8000} = 0.1375,
\quad
\Delta f_2 = \frac{3500-2300}{8000} = 0.15.
\]
Using Hamming window (≈53 dB stopband, 0.0194 dB ripple):
\[
N_1 = \frac{3.3}{0.1375} \approx 24,\quad
N_2 = \frac{3.3}{0.15} \approx 22.
\]
Choose \(N=25\) .
Cutoff frequencies for ideal bandpass:
\[
f_L = \frac{1600+500}{2} = 1050\; \text{Hz},\quad
f_H = \frac{3500+2300}{2} = 2900\; \text{Hz}.
\]
Normalized:
\[
\Omega_L = 0.2625\pi,\quad
\Omega_H = 0.725\pi.
\]
Use firwd(25, 3, Ω_L, Ω_H, 4) to generate Hamming-windowed bandpass FIR.
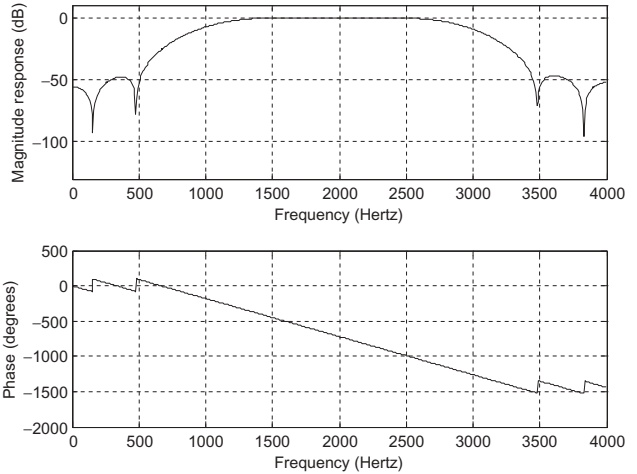
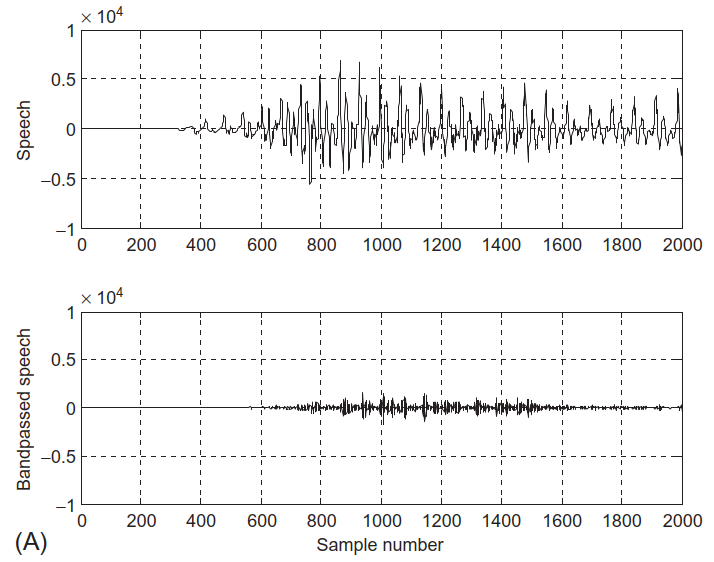
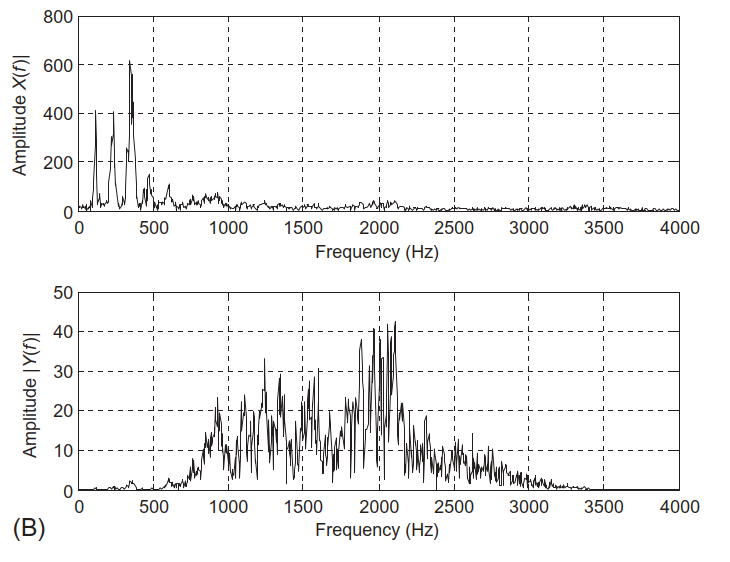
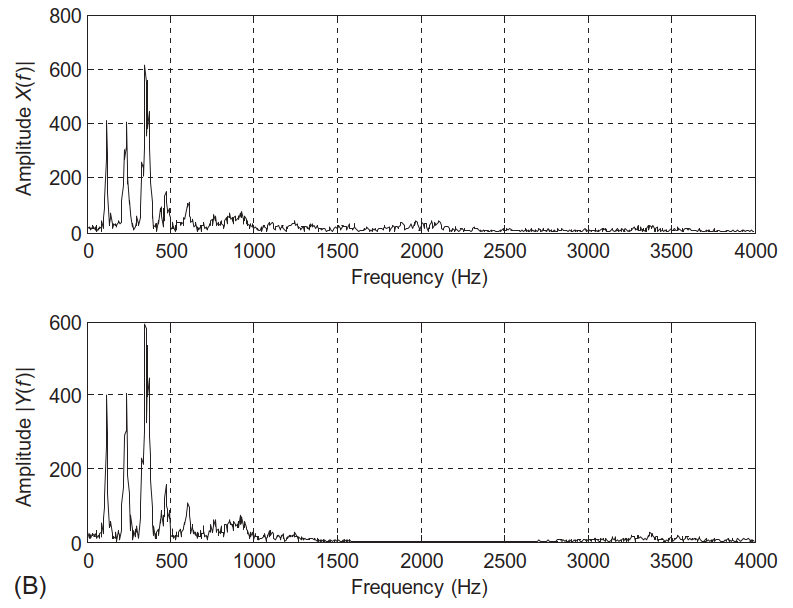
Example 7.10 – Bandpass on Speech
Frequency response:
Coefficients in Table 7.9.
Example 7.11 – Bandstop Design from Specs
Specs:
Lower cutoff: 1250 Hz.
Lower transition width: 1500 Hz.
Upper cutoff: 2850 Hz.
Upper transition width: 1300 Hz.
Stopband attenuation: 60 dB.
Passband ripple: 0.02 dB.
\(f_s = 8000\) Hz.
Transition widths:
\[
\Delta f_1 = \frac{1500}{8000} = 0.1875,\quad
\Delta f_2 = \frac{1300}{8000} = 0.1625.
\]
Need ≈60 dB attenuation ⇒ Blackman window (~74 dB).
Lengths:
\[
N_1 = \frac{5.5}{0.1875} \approx 29.3,\quad
N_2 = \frac{5.5}{0.1625} \approx 33.8.
\]
Choose odd \(N=35\) .
Cutoff frequencies:
\[
\Omega_L = 2\pi\frac{1250}{8000} = 0.3125\pi,\quad
\Omega_H = 2\pi\frac{2850}{8000} = 0.7125\pi.
\]
Use firwd(35, 4, Ω_L, Ω_H, 5) to get bandstop FIR.
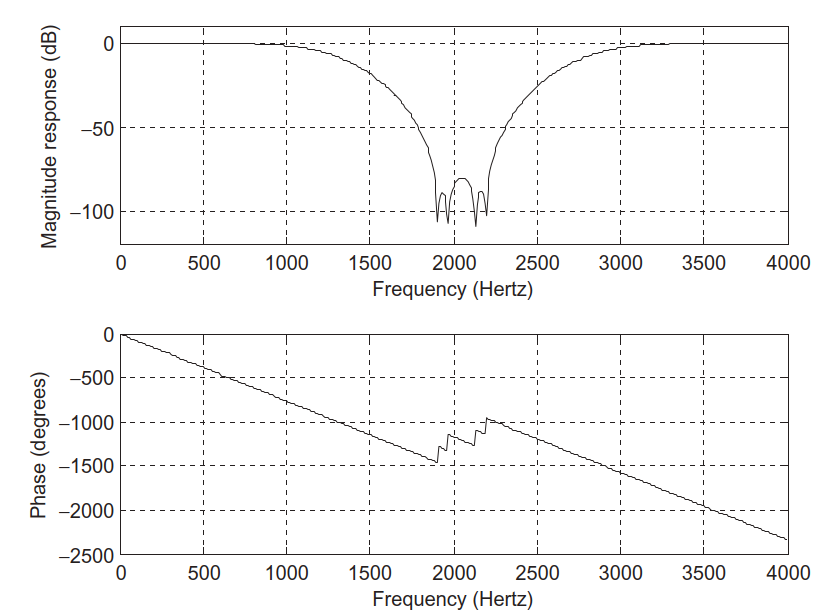
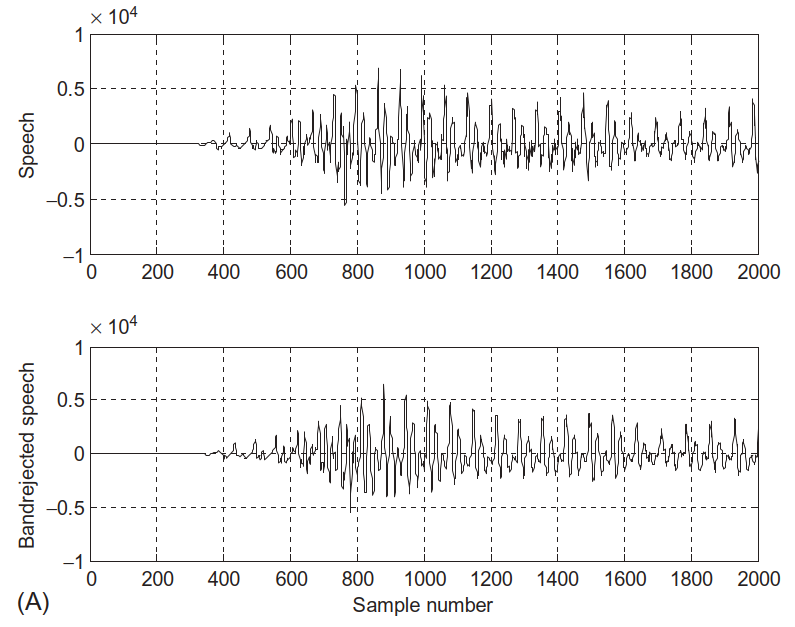
Example 7.11 – Bandstop on Speech
Frequency response:
Coefficients in Table 7.10.
Use case: removing a narrowband interference (like a whistle) from speech.
Ideal lowpass impulse response:
\[
h(n) =
\begin{cases}
\frac{\Omega_c}{\pi}, & n=0, \\
\frac{\sin(\Omega_c n)}{\pi n}, & n\neq 0.
\end{cases}
\]
Other ideal FIRs (noncausal):
Lowpass:
\[
h(n) = \frac{\Omega_c}{\pi} \text{ for } n=0;\quad
h(n) = \frac{\sin(\Omega_c n)}{n\pi} \text{ for } n\neq 0.
\]
Highpass:
\[
h(0) = \frac{\pi - \Omega_c}{\pi};\quad
h(n) = -\frac{\sin(\Omega_c n)}{n\pi},\; n\neq 0.
\]
Bandpass:
\[
h(0) = \frac{\Omega_H - \Omega_L}{\pi};\quad
h(n) = \frac{\sin(\Omega_H n)}{n\pi} - \frac{\sin(\Omega_L n)}{n\pi},\; n\neq 0.
\]
Bandstop:
\[
h(0) = \frac{\pi - \Omega_H + \Omega_L}{\pi};\quad
h(n) = -\frac{\sin(\Omega_H n)}{n\pi} + \frac{\sin(\Omega_L n)}{n\pi},\; n\neq 0.
\]
Windowing:
\[
h_w(n) = h(n) w(n),\quad -M \le n \le M.
\]
Causal coefficients:
\[
b_n = h_w(n-M),\quad n=0,1,\dots,2M.
\]
Linear phase (symmetric FIR, odd length):
\[
\angle H(e^{j\Omega}) = -M\Omega \; (+ \text{optional } \pi \text{ jumps}).
\]
Transition width and length (example for Hamming):
\[
\Delta f = \frac{|f_{\text{stop}} - f_{\text{pass}}|}{f_s},\quad
N \approx \frac{3.3}{\Delta f}.
\]
\[
f_c = \frac{f_{\text{pass}} + f_{\text{stop}}}{2}.
\]
FIR Filter Design – Interactive Deck
How to Use This Interactive Deck
All code runs in your browser using Pyodide (Python in WebAssembly).
You can:
Edit and run Python code ({pyodide} blocks).
Use sliders and controls ({ojs} blocks) to change parameters.
See FIR impulse and frequency responses update live with Plotly.
Try to:
Change cutoff frequencies.
Change filter length (N).
Change window type.
Observe the effects on ripples, transition width, and phase.
Explain to students that this deck is for exploration . Encourage them to “break” things: choose extreme parameter values and see what happens.
Make sure the environment is set up with Pyodide, Plotly, and OJS in Quarto. Usually this just works in the browser for Quarto Reveal presentations.
Warm-Up: Evaluate a Simple FIR Filter in Python
Task: Change the coefficients and input samples and re-run the code.
Try:
Change b to [1/3, 1/3, 1/3] → moving average lowpass.
Change x to a step: [0, 0, 1, 1, 1, 1].
Interactive: Impulse Response of an Ideal Lowpass (Analytical)
We know the ideal lowpass impulse response is
\[
h(n) =
\begin{cases}
\Omega_c / \pi, & n = 0, \\
\sin(\Omega_c n) / (\pi n), & n \neq 0.
\end{cases}
\]
Use the sliders to see how \(\Omega_c\) and truncation index \(M\) affect \(h(n)\) .
= Inputs. range ([0.1 , 0.9 ], {step : 0.05 , label : "Normalized cutoff Ω_c / π" })= Inputs. range ([3 , 40 ], {step : 1 , label : "Truncation index M (half-length)" } )
Interactive: From Ideal Noncausal \(h(n)\) to Causal \(b_n\)
We shift the impulse response by \(M\) samples to get a causal FIR:
\[
b_n = h(n - M), \quad n = 0,\dots,2M.
\]
Interactively see the effect of the shift.
= Inputs. range ([3 , 20 ], {step : 1 , label : "M (shift, and half-length)" })
Point out:
The shape is the same, only shifted right.
The causal version starts at n=0; all negative-time samples are moved to positive n.
Interactive: Magnitude Response of an Ideal-Truncated Lowpass
Now we compute the DTFT of truncated \(h(n)\) and plot \(|H(e^{j\Omega})|\) .
= Inputs. range ([0.1 , 0.9 ], {step : 0.05 , label : "Normalized cutoff Ω_c / π" })= Inputs. range ([5 , 60 ], {step : 1 , label : "M (truncation index)" } )
Explore:
Increase \(M\) ⇒ transition narrows, side lobes get closer together.
Observe Gibbs ripples near the cutoff.
Interactive: Add a Window – Compare Rectangular vs Hamming
We now apply a window to \(h(n)\) :
\[
h_w(n) = h(n) w(n).
\]
Compare rectangular and Hamming windows.
= Inputs. range ([0.1 , 0.9 ], {step : 0.05 , label : "Normalized cutoff Ω_c / π" })= Inputs. range ([5 , 60 ], {step : 1 , label : "M (half-length)" } )= Inputs. select ("Rectangular" , "Hamming" , "Both" ], label : "Window type" , value : "Both" }
Observe:
Rectangular: sharper transition, higher side lobes.
Hamming: slightly wider main lobe, much lower side lobes.
Interactive: Window Choices – Hanning vs Hamming vs Blackman
Play with different windows and see main-lobe / side-lobe trade-offs.
= Inputs. range ([0.1 , 0.9 ], {step : 0.05 , label : "Normalized cutoff Ω_c / π" })= Inputs. range ([10 , 80 ], {step : 2 , label : "M (half-length)" } )= Inputs. checkbox ("Rectangular" , "Hanning" , "Hamming" , "Blackman" ], label : "Windows to plot" , value : ["Rectangular" , "Hanning" , "Hamming" , "Blackman" ]}
Try:
Compare Blackman vs Hamming: note much lower side lobes but wider transition.
Turn windows on/off to see differences clearly.
Interactive: Length Estimation from Specs (Table 7.7)
Use the rules of thumb to estimate \(N\) from transition width \(\Delta f\) .
= Inputs. range ([0.01 , 0.3 ], {step : 0.005 , label : "Normalized transition width Δf" })= Inputs. select ("Rectangular" , "Hanning" , "Hamming" , "Blackman" ], label : "Window type" , value : "Hamming" }
Experiment:
Narrower (f) ⇒ larger (N).
Different windows need different lengths to achieve similar transition widths.
Interactive: Build a Lowpass Filter to Spec (Full Workflow)
Let’s approximate a lowpass design with:
Passband edge \(f_{pass}\) .
Stopband edge \(f_{stop}\) .
Sampling rate \(f_s = 8000\) Hz (fixed).
Choose window type.
= Inputs. range ([500 , 3500 ], {step : 100 , label : "Passband edge f_pass (Hz)" , value : 1800 })= Inputs. range ([600 , 3900 ], {step : 100 , label : "Stopband edge f_stop (Hz)" , value : 2200 })= Inputs. select ("Rectangular" , "Hanning" , "Hamming" , "Blackman" ], label : "Window type" , value : "Hamming" }
Challenge:
Try to match the spec from Example 7.8 (0–1850 Hz passband, 2150–4000 Hz stopband).
Compare your chosen window and N to the textbook’s.
Interactive: Time-Domain Filtering of a Sinusoid Sum
Test the linear phase property of a symmetric FIR on a sum of sinusoids.
= Inputs. range ([200 , 1500 ], {step : 50 , label : "Sinusoid 1 frequency f1 (Hz)" , value : 400 })= Inputs. range ([500 , 3000 ], {step : 50 , label : "Sinusoid 2 frequency f2 (Hz)" , value : 1200 })= Inputs. range ([5 , 41 ], {step : 2 , label : "Filter length N (odd)" , value : 17 })= Inputs. range ([0.1 , 0.9 ], {step : 0.05 , label : "Normalized cutoff Ω_c / π for lowpass" , value : 0.4 })
Explore:
Adjust \(f_1\) and \(f_2\) to be both below cutoff, both above , or one below and one above.
Watch how the waveform shape and delay change.
Summary & Next Steps
In this interactive deck you:
Implemented FIR filtering in Python.
Built ideal lowpass impulse responses and made them causal.
Visualized the Gibbs effect with finite-length truncation.
Applied different windows and saw main-lobe / side-lobe trade-offs.
Used spec-based formulas to estimate FIR length and design complete filters.
Observed linear-phase behavior in the time domain.
Suggested follow-ups:
Extend these examples to highpass , bandpass , and bandstop designs.
Replace sinusoids with real speech or music clips and listen to the effect (in a full Python or MATLAB environment).
Explore automated design functions (firwin in SciPy, fir1 in MATLAB) and compare with your manual designs.
Encourage students to save their favorite designs (cutoffs, N, window) and bring them to lab.
You can ask them to explain in a short paragraph:
Why they chose that window.
How many taps they used and why.
What trade-offs they observed in the magnitude response.