Steady-State Errors in Feedback Control Systems
Control 7
7.1 Why Steady-State Error Matters
Control design typically balances:
Transient response (speed, overshoot)
Stability (bounded response)
Steady-state accuracy (how close output is to input as \(t \to \infty\) )
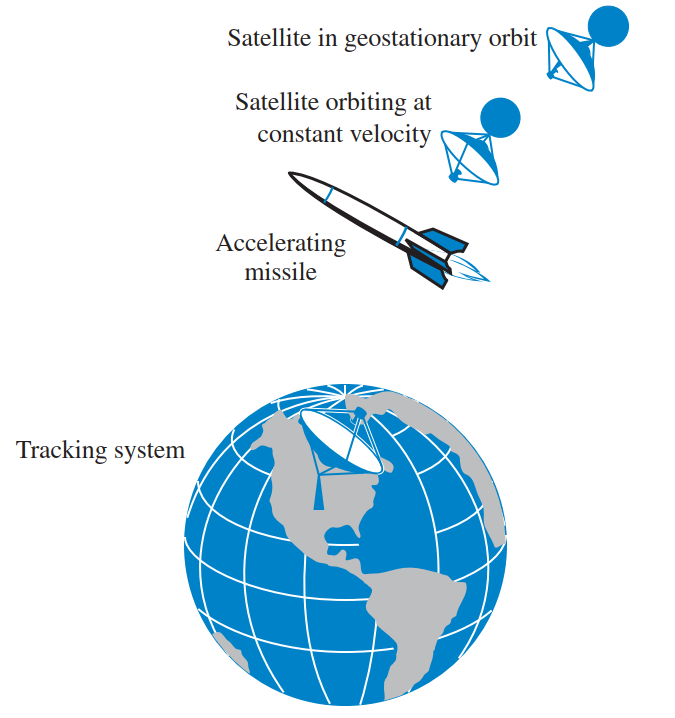
In real ECE systems:
Antenna pointing at a satellite must not “settle” with a 5° offset.
Robot arm placing chips on a PCB must not have a 0.5 mm final offset.
Motor speed controller must maintain constant speed under load changes.
Steady-state error quantifies how much mismatch remains after transients die out .
Key idea: Even a stable system with “nice” transients can have unacceptable steady-state error.
Use examples students know: servo motor that seems to “lock” but is just slightly off.
Contrast with stability: an unstable system never reaches steady state; steady-state error only makes sense for stable systems.
Definition of Steady-State Error
For a (stable) feedback system:
Input: \(r(t)\)
Output: \(c(t)\)
Error: \(e(t) = r(t) - c(t)\)
Steady-state error:
\[
e_{ss} = e(\infty) = \lim_{t \to \infty} e(t)
\]
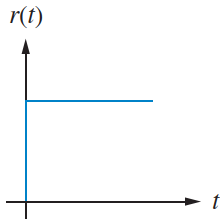
We evaluate \(e_{ss}\) using standard test inputs that model physical motion of a position system:
Step: constant position
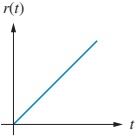
Ramp: constant velocity
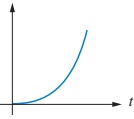
Parabola: constant acceleration
TABLE 7.1 – Test Inputs
Step
\(1\) \(\dfrac{1}{s}\)
Ramp
\(t\) \(\dfrac{1}{s^2}\)
Parabola
\(\dfrac{t^2}{2}\) \(\dfrac{1}{s^3}\)
Clarify the small correction: for a parabolic input with constant acceleration, the usual time function is \(\frac{1}{2} t^2\) with Laplace \(\frac{1}{s^3}\) . The original table in the text has a typo; use the consistent version here.
Explain that for steady-state error design we care about these “idealized” inputs because: - They correspond to basic motion primitives (const position/velocity/accel). - They’re easy to handle in Laplace domain.
Steady-State Error Requires Stability
We focus on stable systems :
Natural response → \(0\) as \(t \to \infty\)
Eventually only forced response remains
Makes sense to talk about a finite steady-state value
Unstable systems:
Natural response grows without bound
Output dominates input
“Steady-state error” formulas from this chapter do not apply
Always check closed-loop stability before trusting any steady-state error calculation.
Mention Routh-Hurwitz (Chapter 6) as the usual tool.
In practice, design loop: choose architecture → check stability → then compute steady-state error. Doing it in reverse can lead to nonsense (finite error statements on unstable systems).
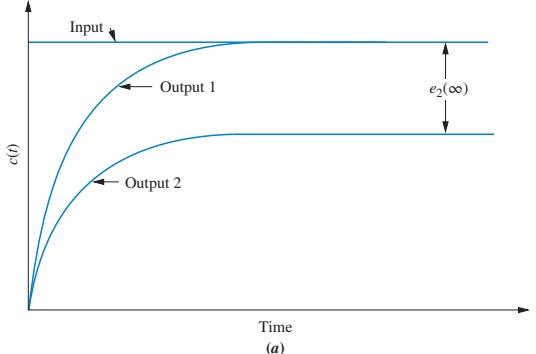
How Do We “See” Steady-State Error?
For a step input:
Output 1: output converges exactly to input → \(e_{ss} = 0\)
Output 2: output converges to a different constant → finite \(e_{ss}\)
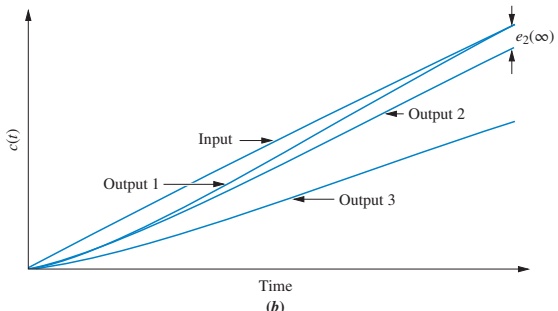
For a ramp input:
Output 1: slope and offset match → \(e_{ss} = 0\)
Output 2: same slope, different offset → finite \(e_{ss}\)
Output 3: different slope → error grows without bound → \(e_{ss} = \infty\)
Emphasize: we measure error vertically between input and output after transients die out .
For the ramp case, “infinite error” means the difference grows linearly without bound.
Ask students: looking at Output 3 for the ramp, what kind of system behavior might cause this? (Not enough integrators to match input slope.)
General Closed-Loop View of Error
General closed-loop system
Closed-loop transfer: \(T(s) = \dfrac{C(s)}{R(s)}\)
Error: \(E(s) = R(s) - C(s)\)
Unity feedback case
Same diagram with \(H(s)=1\) :
\(E(s) = R(s) - C(s)\) \(C(s) = E(s) G(s)\) Focus in Sections 7.2–7.4: unity feedback systems
Clarify: We will first derive formulas in terms of \(T(s)\) , then show a more insightful form in terms of \(G(s)\) for unity feedback.
Students often conflate \(G(s)\) and \(T(s)\) ; emphasize: - \(G(s)\) = forward path (controller + plant). - \(T(s)\) = closed-loop transfer from \(R\) to \(C\) .
Apply final value theorem:
\[
e(\infty) = \lim_{s \to 0} s E(s) = \lim_{s \to 0} \frac{s R(s)}{1 + G(s)}
\]
This is our master formula for unity feedback steady-state error.
This form makes it easy to see the effect of open-loop dynamics \(G(s)\) and the input type \(R(s)\) on \(e_{ss}\) .
Stress that this is more insightful for design: we can reason about how many integrators we need in \(G(s)\) to get zero error for a given input.
Later, this is what feeds into “system type” and static error constants.
When Is Step Error Zero or Finite?
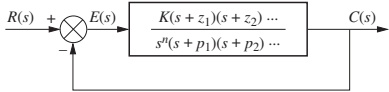
Assume
\[
G(s) = \frac{(s+z_1)(s+z_2)\cdots}{s^n (s+p_1)(s+p_2)\cdots}
\]
Evaluate \(K_p = \lim_{s \to 0} G(s)\) :
If \(n = 0\) (no integrators):
\[
K_p = \frac{z_1 z_2 \cdots}{p_1 p_2 \cdots} \quad \Rightarrow \quad \text{finite} \Rightarrow e_{step}(\infty) \text{ finite}
\]
If \(n \ge 1\) (at least one pole at origin \(\Rightarrow\) at least one integrator):
Denominator has \(s^n\) ; as \(s \to 0\) , denominator \(\to 0\) , so
\[
K_p = \lim_{s \to 0} G(s) = \infty \quad \Rightarrow \quad e_{step}(\infty) = 0
\]
Interpretation:
At least one integrator in the forward path → zero step error .
No integrator → nonzero finite step error .
Integrator in the forward path eliminates constant-position error for unity feedback.
Make the time-domain connection:
\(1/s\) factor in \(G(s)\) corresponds to \(\int\) in time.
Physical analog: a DC motor’s angle is the integral of angular velocity; thus the motor alone behaves as an integrator. That’s why simple position servos with DC motors can achieve zero static position error under unity feedback.
So approximately:
\[
e_{ramp}(\infty) = \frac{1}{\displaystyle \lim_{s \to 0} s G(s)} = \frac{1}{K_v}
\]
where
\[
K_v = \lim_{s \to 0} s G(s)
\]
Explain why the simplification to \(1/(sG(s))\) is valid: for non-pathological systems, \(1 + G(s) \approx G(s)\) at low frequency when \(G(0)\) is large.
But the more rigorous path is to factor out \(s\) in denominator:
\(\frac{1}{s + s G(s)} = \frac{1}{s(1 + G(s))}\) , and then use the fact that only systems with enough integrators give a nonzero finite limit.
Evaluate \(K_v = \lim_{s \to 0} s G(s)\) :
If \(n = 0\) :
\[
K_v = \lim_{s \to 0} s G(s) = 0 \Rightarrow e_{ramp}(\infty) = \infty
\]
If \(n = 1\) :
\[
K_v = \frac{z_1 z_2 \cdots}{p_1 p_2 \cdots} \quad \Rightarrow \quad \text{finite} \Rightarrow e_{ramp}(\infty) \text{ finite}
\]
If \(n \ge 2\) :
Denominator has \(s^{n-1}\) with \(n-1 \ge 1\) ; \(\Rightarrow\) denominator \(\to 0\) as \(s \to 0\) , so
\[
K_v = \infty \Rightarrow e_{ramp}(\infty) = 0
\]
So:
No integrators → ramp error infinite (slopes do not match).
One integrator → finite ramp error (same slope, offset).
Two or more integrators → zero ramp error.
Relate to the figure with ramp outputs:
Type 0: Output 3 (slopes differ).
Type 1: Output 2 (same slope, constant offset).
Type 2: Output 1 (no offset).
We’ll soon map this to formal “Type 0/1/2” terminology.
Again use \(G(s)\) with \(n\) integrators:
\[
s^2 G(s) = \frac{(s+z_1)(s+z_2)\cdots}{s^{n-2} (s+p_1)(s+p_2)\cdots}
\]
If \(n = 0\) or \(n = 1\) :
\(s^{n-2}\) is in numerator → \(\lim s^2 G(s) = 0\) → error infinite.
If \(n = 2\) :
\(K_a\) finite → finite parabolic error.
If \(n \ge 3\) :
\(K_a = \infty\) → zero parabolic error.
This pattern continues: to track an input whose \(k\) -th derivative is constant, you need at least \(k+1\) integrators to get zero error.
For this course we mainly stick to step, ramp, parabolic.
Example 7.3 – System with One Integrator
Now \(G(s)\) includes one \(1/s\) factor (one integrator). Assume closed-loop stable.
Given in text:
\(\lim_{s \to 0} G(s) = \infty\) (due to integrator).\(\lim_{s \to 0} s G(s) = 100\) .
7.3 Static Error Constants
We now formalize the three “special limits” we’ve seen:
Step: \(e_{step}(\infty) = \dfrac{1}{1 + \displaystyle \lim_{s \to 0} G(s)}\)
Ramp: \(e_{ramp}(\infty) = \dfrac{1}{\displaystyle \lim_{s \to 0} s G(s)}\)
Parabola: \(e_{parabola}(\infty) = \dfrac{1}{\displaystyle \lim_{s \to 0} s^2 G(s)}\)
Define static error constants :
Position constant:
\[
K_p = \lim_{s \to 0} G(s)
\]
Velocity constant:
\[
K_v = \lim_{s \to 0} s G(s)
\]
Acceleration constant:
\[
K_a = \lim_{s \to 0} s^2 G(s)
\]
Then:
\(e_{step}(\infty) = \dfrac{1}{1 + K_p}\) \(e_{ramp}(\infty) = \dfrac{1}{K_v}\) \(e_{parabola}(\infty) = \dfrac{1}{K_a}\)
Larger static error constant \(\Rightarrow\) smaller steady-state error (for the corresponding input).
Relate to transient specs: \(\zeta, \omega_n, T_s, \%OS\) specify transient performance; \(K_p, K_v, K_a\) specify steady-state performance.
Also emphasize: \(K_p, K_v, K_a\) can be 0, finite, or infinite.
Example 7.4 – Using Static Error Constants
For each system in Figure 7.7, compute \(K_p, K_v, K_a\) and the corresponding steady-state error for step, ramp, and parabola.
System (a) – Type 0
Given (from text calculations):
\(K_p = \dfrac{500 \cdot 2 \cdot 5}{8 \cdot 10 \cdot 12} = 5.208\) \(K_v = 0\) (no integrator)\(K_a = 0\)
Hence:
Step: \(e(\infty) = \dfrac{1}{1 + K_p} \approx 0.161\)
Ramp: \(e(\infty) = \dfrac{1}{K_v} = \infty\)
Parabola: \(e(\infty) = \dfrac{1}{K_a} = \infty\)
System (b) – Type 1
\(K_p = \infty\) (integrator present)\(K_v = \dfrac{500 \cdot 2 \cdot 5 \cdot 6}{8 \cdot 10 \cdot 12} = 31.25\) \(K_a = 0\)
Hence:
Step: \(e(\infty) = \dfrac{1}{1 + \infty} = 0\)
Ramp: \(e(\infty) = \dfrac{1}{K_v} = \dfrac{1}{31.25} \approx 0.032\)
Parabola: \(e(\infty) = \dfrac{1}{0} = \infty\)
System (c) – Type 2
\(K_p = \infty\) \(K_v = \infty\) \(K_a = \dfrac{500 \cdot 2 \cdot 4 \cdot 5 \cdot 6 \cdot 7}{8 \cdot 10 \cdot 12} = 875\)
Hence:
Step: \(e(\infty) = 0\)
Ramp: \(e(\infty) = 0\)
Parabola: \(e(\infty) = \dfrac{1}{875} \approx 1.14 \times 10^{-3}\)
Walk through one system in detail; for the others, sketch the counting argument: how many pure \(1/s\) factors? That determines which constants are finite vs. infinite.
Emphasize the pattern: increasing system type (more integrators) progressively improves steady-state error for higher-order inputs.
Skill-Assessment 7.2 – Practice with System Type
Given unity feedback:
\[
G(s) = \frac{1000 (s+8)}{(s+7)(s+9)}
\]
Step 1: Find system type, \(K_p\) , \(K_v\) , \(K_a\) .
No factor of \(1/s\) → Type 0 .
\(K_p = \lim_{s \to 0} G(s) = \dfrac{1000 \cdot 8}{7 \cdot 9} \approx 127\) .\(K_v = \lim_{s \to 0} s G(s) = 0\) .\(K_a = \lim_{s \to 0} s^2 G(s) = 0\) .
Step 2: Steady-state errors:
Step:
\[
e_{step}(\infty) = \frac{1}{1 + K_p} \approx 7.8 \times 10^{-3}
\]
Ramp:
\[
e_{ramp}(\infty) = \frac{1}{K_v} = \infty
\]
Parabola: \(\dfrac{1}{K_a} = \infty\) .
This is a realistic situation: a high-gain Type 0 plant behaves well for step inputs but poorly for velocity/acceleration tracking.
Later, using PI or PID control we can change system type “seen” by the loop.
Example 7.6 – Designing Gain \(K\) from Steady-State Spec
Problem
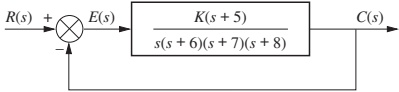
Given unity feedback with forward path \(G(s)\) as in figure, choose \(K\) so that there is 10% error in the steady state .
Step 1 – Identify system type and input
From figure, forward path has one integrator → Type 1 .
Type 1: finite error only for ramp input.
So “10% steady-state error” must refer to a ramp input.
Thus:
\[
e_{ramp}(\infty) = \frac{1}{K_v} = 0.1 \quad \Rightarrow \quad K_v = 10
\]
Step 2 – Compute \(K_v\) in terms of \(K\)
From figure’s \(G(s)\) :
\[
G(s) = \frac{K \cdot 5}{s (s+6)(s+7)(s+8)}
\]
Then:
\[
K_v = \lim_{s \to 0} s G(s) = \frac{K \cdot 5}{6 \cdot 7 \cdot 8}
\]
Set equal to desired \(K_v\) :
\[
10 = \frac{5K}{6 \cdot 7 \cdot 8}
\]
Solve:
\[
K = 10 \cdot \frac{6 \cdot 7 \cdot 8}{5} = 672
\]
Step 3 – Check stability (Routh-Hurwitz)
At \(K = 672\) , closed-loop is stable (as given in text).
Meeting steady-state error specs with a large gain may degrade transient response or stability margins. Always check both.
Walk through computing \(K_v\) carefully. Students often forget to multiply by \(s\) only once, not twice.
You might show how to quickly verify closed-loop stability using Routh, but details can be deferred to a later session.
Skill-Assessment 7.3 – Gain from Ramp Error
Given unity feedback:
\[
G(s) = \frac{K (s+12)}{(s+14)(s+18)}
\]
System has no integrator → Type 0 → cannot have finite ramp error.
But text’s answer says \(K = 189\) for “10% error in steady state.”
Interpreting:
For Type 0, finite error spec must be for step input.
So \(e_{step}(\infty) = 0.1\) .
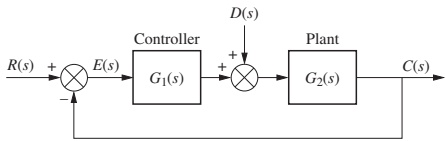
7.5 Steady-State Error Due to Disturbances
So far: we considered error due to the reference input \(R(s)\) .
Now: consider disturbances \(D(s)\) entering between controller and plant.
\(G_1(s)\) : controller + pre-plant dynamics\(G_2(s)\) : plant (and maybe actuator)Disturbance \(D(s)\) enters between them.
We want to know how well feedback cancels the effect of \(D(s)\) on the error \(E(s)\) .
Explain that in many practical systems, disturbances are loads, torque disturbances, noise, etc. For a motor, \(D(s)\) might be an external torque.
Emphasize: One major advantage of feedback is disturbance rejection.
Solve for \(E(s)\) :
\[
E(s) = \frac{1}{1 + G_1(s) G_2(s)} R(s) - \frac{G_2(s)}{1 + G_1(s) G_2(s)} D(s)
\]
Apply final value theorem:
\[
\begin{aligned}
e(\infty) &= \lim_{s \to 0} s E(s) \\
&= \lim_{s \to 0} \frac{s}{1 + G_1(s) G_2(s)} R(s)
- \lim_{s \to 0} \frac{s G_2(s)}{1 + G_1(s) G_2(s)} D(s) \\
&= e_R(\infty) + e_D(\infty)
\end{aligned}
\]
Where:
\(e_R(\infty)\) : contribution from reference \(R(s)\) (already studied).\(e_D(\infty)\) : contribution from disturbance \(D(s)\) .
Highlight superposition: because the system is linear, we can treat reference and disturbance separately and add their effects.
Focus now on \(e_D(\infty)\) for a particular \(D(s)\) (step disturbance).
Step Disturbance – Expression for \(e_D(\infty)\)
Assume a step disturbance :
\(d(t) = u(t)\) \(D(s) = \dfrac{1}{s}\)
The disturbance contribution to steady-state error is:
\[
e_D(\infty) = -\lim_{s \to 0} \frac{s G_2(s)}{1 + G_1(s) G_2(s)} D(s)
= -\lim_{s \to 0} \frac{s G_2(s)}{1 + G_1(s) G_2(s)} \cdot \frac{1}{s}
\]
Simplify:
\[
e_D(\infty) = -\lim_{s \to 0} \frac{G_2(s)}{1 + G_1(s) G_2(s)}
\]
With some algebra (factor \(G_2(s)\) out of denominator), this can be rearranged as:
\[
e_D(\infty) = -\frac{1}{\displaystyle \lim_{s \to 0} \frac{1}{G_2(s)} + \lim_{s \to 0} G_1(s)}
\]
To reduce error from a step disturbance , either:
Increase dc gain of controller \(G_1(s)\) , or
Decrease dc gain of plant \(G_2(s)\) .
Intuition: see the next slide with the rearranged block diagram. Increasing loop gain \(G_1G_2\) makes the feedback better at rejecting disturbances.
However, decreasing \(G_2\) may not be practical if it represents physical plant gain. More often we increase \(G_1\) or add integrators in \(G_1\) .
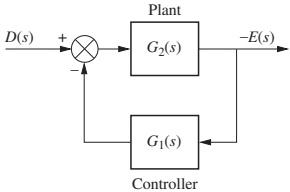
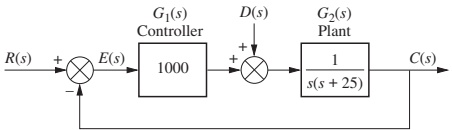
Example 7.7 – Disturbance Rejection
Problem
Find steady-state error component due to a step disturbance for the system in the figure.
Given in text:
System is stable.
\(G_1(s)\) has large dc gain; \(G_2(s)\) has infinite dc gain.
Using the formula:
\[
e_D(\infty) = -\frac{1}{\displaystyle \lim_{s \to 0} \frac{1}{G_2(s)} + \lim_{s \to 0} G_1(s)}
\]
Given:
\(\lim_{s \to 0} \dfrac{1}{G_2(s)} = 0\) (since \(G_2(0) = \infty\) )\(\lim_{s \to 0} G_1(s) = 1000\)
Then:
\[
e_D(\infty) = -\frac{1}{0 + 1000} = -\frac{1}{1000}
\]
So the steady-state error caused by a unit step disturbance is \(-10^{-3}\) .
Error magnitude is inversely proportional to controller dc gain.
Explain sign: negative error means the controller output opposes the disturbance; but usually we care about magnitude for spec purposes.
Ask: What happens if we double the gain of \(G_1\) to 2000? Error due to disturbance halves to \(-5 \times 10^{-4}\) .
But again, increasing gain indefinitely is limited by stability concerns.
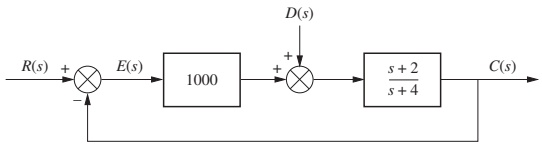
Skill-Assessment 7.4 – Disturbance Practice
Given system and step disturbance \(D(s) = \dfrac{1}{s}\) , evaluate disturbance-induced steady-state error.
Text answer:
\[
e_D(\infty) = -9.98 \times 10^{-4}
\]
This is nearly \(-10^{-3}\) , suggesting that the loop gain is around 1000 in dc.
Encourage students to compute \(\lim_{s \to 0} 1/G_2(s)\) and \(\lim_{s \to 0} G_1(s)\) for this system and verify the formula numerically as an exercise.
This reinforces use of low-frequency limits and the idea that large gain → small disturbance error.
Real-World ECE Application – Robot Positioning
In semiconductor manufacturing:
Robots move wafers or chips with high precision.
Design spec may say:
Step position change: final error \(< 0.01\) mm.
Conveyor with constant speed: tracking error \(< 0.1\) mm.
Design approach:
Use Type 1 or Type 2 systems with appropriate \(K_p, K_v\) to meet these specs.
Add integrators in controller (PI / PID) to increase type and improve steady-state accuracy.
Also design for good disturbance rejection to handle load changes, friction, etc.
Remind students: the vocabulary and formulas they’re learning here translate directly into real “spec sheets” for industrial control systems.
Encourage them to read a servomotor datasheet and look for terms like “tracking error” or “steady-state accuracy”; they map to these concepts.
From open-loop \(G(s)\) :
\[
E(s) = \frac{R(s)}{1 + G(s)}
\]
\[
e(\infty) = \lim_{s \to 0} \frac{s R(s)}{1 + G(s)}
\]
Static error constants:
\[
K_p = \lim_{s \to 0} G(s), \quad
K_v = \lim_{s \to 0} s G(s), \quad
K_a = \lim_{s \to 0} s^2 G(s)
\]
Steady-state errors:
Step \(u(t)\) :
\[
e_{step}(\infty) = \frac{1}{1 + K_p}
\]
Ramp \(t u(t)\) :
\[
e_{ramp}(\infty) = \frac{1}{K_v}
\]
Parabola \(\dfrac{t^2}{2} u(t)\) :
\[
e_{parabola}(\infty) = \frac{1}{K_a}
\]
Disturbance Steady-State Error (Step Disturbance)
With disturbance \(D(s)\) between \(G_1\) and \(G_2\) :
\[
e_D(\infty) = -\lim_{s \to 0} \frac{s G_2(s)}{1 + G_1(s) G_2(s)} D(s)
\]
For step \(D(s) = \dfrac{1}{s}\) :
\[
e_D(\infty) = -\frac{1}{\displaystyle \lim_{s \to 0} \frac{1}{G_2(s)} + \lim_{s \to 0} G_1(s)}
\]
Encourage students to keep this slide (or a printed formula sheet) handy for homework and exams.
Point out that all formulas are just applications of: 1. Block-diagram algebra. 2. Final value theorem. 3. Low-frequency limits of \(G(s)\) .
Steady-State Errors – Interactive Deck
Visualizing Step Response vs. \(K_p\) (Simple Approximation)
We’ll approximate steady-state behavior by evaluating \(T(0)\) for a step, where
\[
T(s) = \frac{G(s)}{1 + G(s)}.
\]
If the input step amplitude is 1, then steady-state output ≈ \(T(0)\) , and
\[
e_{ss} \approx 1 - T(0).
\]
= Inputs. range ([0 , 200 ], {step : 10 , value : 20 , label : "Gain K" })
Try:
Increase K_step. How do \(T(0)\) and \(e_{ss}\) change?
Interpret \(T(0)\) physically (gain from input to output for DC).
Explain that for step inputs, the static gain \(T(0)\) essentially tells us how close the output gets to the commanded value in steady state.
For unity gain tracking, we want \(T(0) \approx 1\) , which means high \(K_p\) .
Disturbance Rejection – Time-Domain Simulation
Now let’s simulate a disturbance step entering the plant input and see how the output error behaves.
We consider the canonical structure:
\[
G_1(s) = K_1, \quad G_2(s) = \frac{K_2}{s+1}.
\]
= Inputs. range ([0 , 1000 ], {step : 100 , value : 500 , label : "K1 (controller gain)" })= Inputs. range ([0 , 10 ], {step : 1 , value : 5 , label : "K2 (plant gain)" })
Try:
Increase K1_d. Does steady-state error magnitude decrease?
Change K2_d. How does that affect the shape and final value of E(t)?
Compare with the static formula you just explored.
This reinforces the connection between the analytic formula for \(e_D(\infty)\) and time-domain simulation.
Good to ask students: is there any trade-off in transient behavior as K1 grows large (e.g., overshoot, oscillations)? That bridges to stability and transient design topics.