Reduction of Multiple Subsystems
Control 5
Reduction of Multiple Subsystems
Block Diagrams, Signal-Flow Graphs, and Mason’s Rule
Learning Objectives
After this session, you will be able to:
- Reduce a multi-block diagram into a single transfer function using block diagram algebra.
- Recognize and use the cascade, parallel, and feedback interconnection forms.
- Use block moves (across summing junctions and pickoff points) to reveal familiar forms.
- Convert block diagrams ↔︎ signal‑flow graphs.
- Compute a system transfer function using Mason’s Rule.
- Analyze and design second‑order feedback systems built from multiple subsystems (overshoot, settling time, etc.).
5.1 Why Reduce Multiple Subsystems?
We start with subsystems:
- Each subsystem: a block with input, output, and transfer function.
- Real systems: many subsystems interconnected.
Goal:
- Replace the whole interconnection by one equivalent transfer function from input to output.
- Then we can:
- Apply transient-analysis formulas.
- Study stability (poles).
- Design gains and compensators.
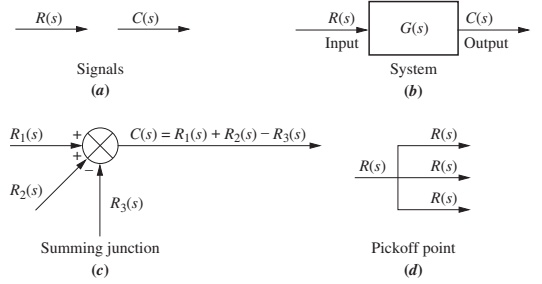
Block diagrams vs. signal-flow graphs
- Block diagrams
- Blocks + summing junctions + pickoff points.
- Common in frequency-domain analysis & design.
- Signal‑flow graphs
- Nodes = signals.
- Directed branches = transfer functions.
- Very convenient for state‑space and for using Mason’s Rule.
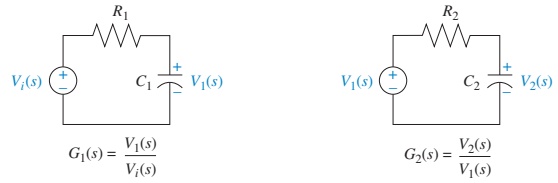
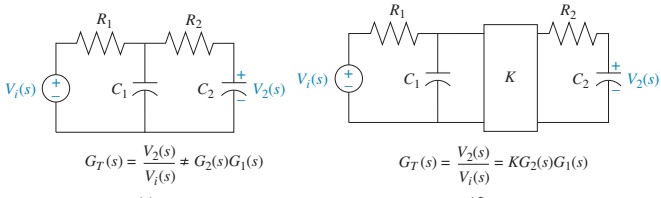
For each isolated network:
If we naively cascade:
\[
G_{\text{naive}}(s) = G_2(s)G_1(s) =
\frac{\frac{1}{R_1 C_1 R_2 C_2}}{s^2 + \left(\frac{1}{R_1 C_1} + \frac{1}{R_2 C_2}\right)s + \frac{1}{R_1 C_1 R_2 C_2}}
\]
But the true transfer function (from circuit analysis) is:
\[
G(s) = \frac{V_2(s)}{V_i(s)} =
\frac{\frac{1}{R_1 C_1 R_2 C_2}}{s^2 + \left(\frac{1}{R_1 C_1} + \frac{1}{R_2 C_2} + \frac{1}{R_2 C_1}\right)s + \frac{1}{R_1 C_1 R_2 C_2}}
\]
They are not equal: extra term \(\frac{1}{R_2 C_1}\) appears due to loading.
Block diagram algebra assumes no loading between blocks. If electrical loading exists, you must include it in the model.
Preventing Loading – Buffering
- Amplifier/buffer between RC networks:
- High input impedance ⇒ does not load previous stage.
- Low output impedance ⇒ drives next stage like an ideal source.
Then:
\[
G_{\text{eq}}(s) = K\,G_2(s)G_1(s)
\]
where \(K\) is the amplifier gain.
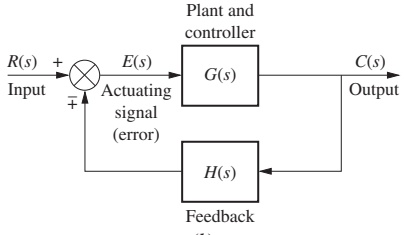
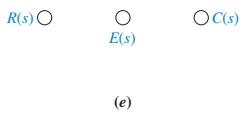
From simplified model:
Eliminate \(E(s)\):
\[
E(s) = \frac{C(s)}{G(s)}
\]
Substitute:
\[
\frac{C(s)}{G(s)} = R(s) \mp C(s)H(s)
\]
Solve for \(C(s)/R(s)\):
\[
G_e(s) = \frac{C(s)}{R(s)} = \frac{G(s)}{1 \pm G(s)H(s)}
\]
The product \(G(s)H(s)\) is the open-loop transfer function or loop gain.
Moving Blocks – Why It Matters
Complex diagrams rarely show clean cascade/parallel/feedback chunks.
We must move blocks across:
- Summing junctions
- Pickoff points
…to expose:
- Pure cascade segments
- Pure parallel segments
- Standard feedback loops
Key idea:
- You may rearrange a block diagram as long as the input–output relationship remains identical.
If you move a block incorrectly, you change the system. Always verify equivalence by writing expressions for intermediate signals.
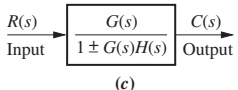
Moving Blocks Across Summing Junctions
- Figure 5.7(a): moving G(s) left across a summing junction that feeds it.
- Figure 5.7(b): moving G(s) right across a summing junction.
In both cases, verify:
- If both \(R(s)\) and \(X(s)\) are multiplied by \(G(s)\) before contributing to the output, the two diagrams are equivalent.
Mathematically, for 5.7(a):
\[
C(s) = [R(s) \mp X(s)]\,G(s) = R(s)G(s) \mp X(s)G(s)
\]
Same result for the rearranged diagram.
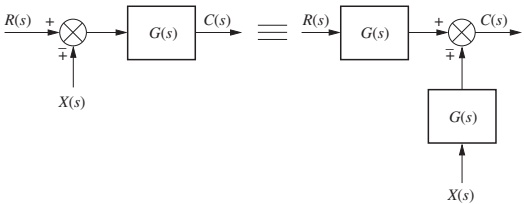
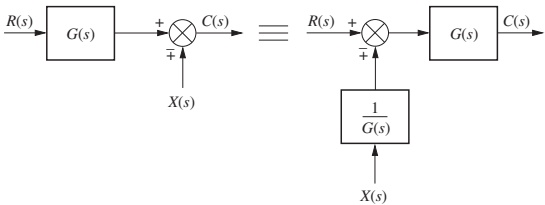
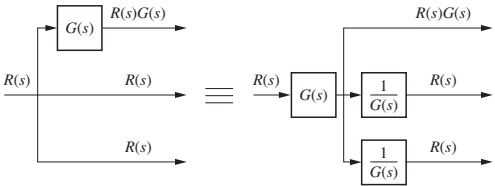
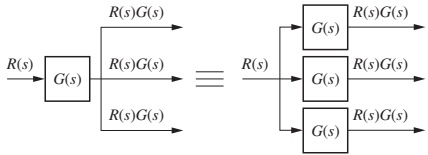
Moving Blocks Across Pickoff Points
- Move block before or after the pickoff, if:
- All branches from the pickoff see the appropriate transformation.
Example reasoning:
- If output branches need the same scaled signal \(G(s)R(s)\), you can move \(G(s)\) before the pickoff.
- If only one branch needs scaling, \(G(s)\) must stay on that branch.
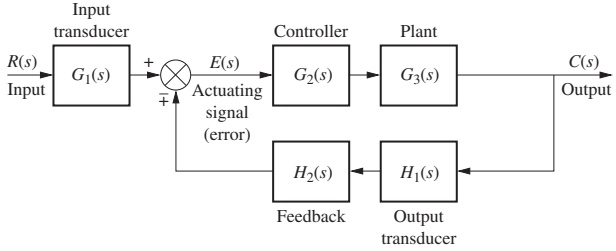
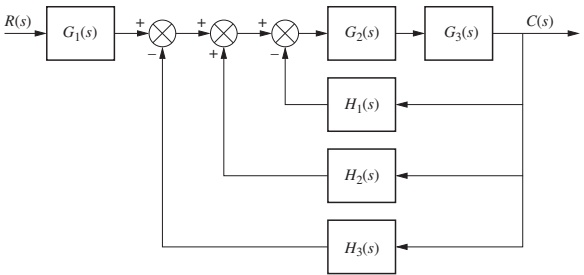
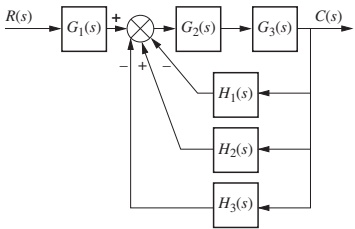
Example 5.1 – Step 1: Collapse Summing Junctions
- Multiple summing junctions in series can be combined into one junction whose inputs are the algebraic sum of all original inputs.
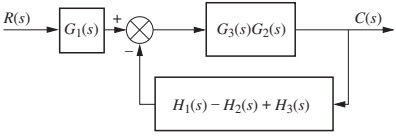
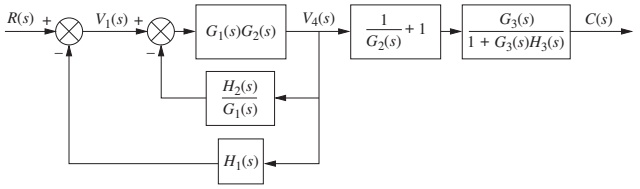
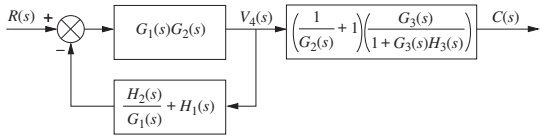
Example 5.1 – Step 2: Cascade and Parallel Recognition
Recognize:
Forward path: \(G_2(s)\) and \(G_3(s)\) in cascade: \[
G_{\text{forward}}(s) = G_3(s)G_2(s)
\]
Feedback path: \(H_1(s), H_2(s), H_3(s)\) in parallel: \[
H_{\text{eq}}(s) = H_1(s) - H_2(s) + H_3(s)
\]
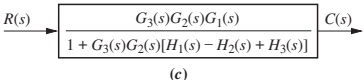
Example 5.1 – Step 3: Final Reduction
- Overall feedback loop: forward path \(G_3 G_2\), feedback \(H_{\text{eq}}\).
Closed-loop equivalent:
\[
\text{Inner loop:}\quad
G_{\text{CL}}(s) =
\frac{G_3(s)G_2(s)}{1 + G_3(s)G_2(s)\,H_{\text{eq}}(s)}
\]
Then cascade with \(G_1(s)\):
\[
T(s) = \frac{C(s)}{R(s)} = G_1(s) \cdot G_{\text{CL}}(s)
\]
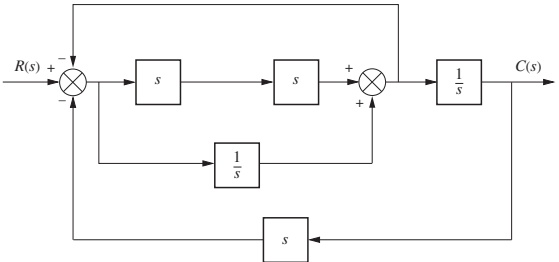
Skill-Assessment Exercise 5.1 (Concept Check)
Problem: Find equivalent transfer function \(T(s) = C(s)/R(s)\) for the system in Figure 5.13.
Given answer:
\[
T(s) = \frac{s^{3} + 1}{2s^{4} + s^{2} + 2s}
\]
Use this as a self-check:
- Try to re-derive \(T(s)\) by systematically using cascade, parallel, and feedback reductions.
- Compare your expression with the given result.
5.3 Feedback Systems – From Structure to Transient Specs
Immediate application:
- Systems that reduce to second-order closed-loop forms.
- Use classic formulas for:
- Percent overshoot (%OS)
- Settling time \(T_s\)
- Peak time \(T_p\)
- Rise time \(T_r\)
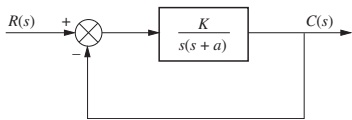
Consider system:
Closed-loop transfer function:
\[
T(s) = \frac{K}{s^{2} + a s + K}
\]
Here:
- \(K\): overall gain (e.g., amplifier gain).
- \(a\): coefficient related to damping (e.g., friction, resistance).
Pole Locations vs. Gain K
Poles of closed-loop system:
For \(0 < K < a^2/4\): real, distinct (overdamped). \[
s_{1,2} = -\frac{a}{2} \pm \frac{\sqrt{a^{2} - 4K}}{2}
\]
For \(K = a^2/4\): real, equal (critically damped).
For \(K > a^2/4\): complex conjugate (underdamped). \[
s_{1,2} = -\frac{a}{2} \pm j\frac{\sqrt{4K - a^{2}}}{2}
\]
For underdamped case:
- Real part fixed at \(-a/2\).
- Imaginary part increases with \(K\).
- Implications:
- Peak time \(T_p\) decreases (faster oscillations).
- Percent overshoot increases (more oscillatory).
- Settling time roughly constant (since real part fixed).
Gain \(K\) trades off speed vs. overshoot. Design is about choosing \(K\) to satisfy both.
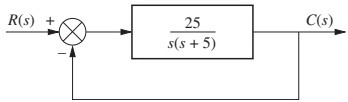
Example 5.3 – Finding Transient Response
Problem: For system in Figure 5.15, find \(T_p\), %OS, and \(T_s\).
Closed-loop transfer function:
\[
T(s) = \frac{25}{s^{2} + 5s + 25}
\]
Compare with standard 2nd-order form:
\[
T(s) = \frac{\omega_n^{2}}{s^{2} + 2\zeta\omega_n s + \omega_n^{2}}
\]
Identify:
- \(\omega_n^2 = 25 \Rightarrow \omega_n = 5\).
- \(2\zeta \omega_n = 5 \Rightarrow 2\zeta(5) = 5 \Rightarrow \zeta = 0.5\).
Now apply standard formulas:
Peak time \[
T_p = \frac{\pi}{\omega_n \sqrt{1-\zeta^{2}}} = 0.726 \text{ s}
\]
Percent overshoot \[
\%OS = e^{-\zeta\pi/\sqrt{1-\zeta^{2}}} \times 100 = 16.3\%
\]
Settling time (2% criterion) \[
T_s = \frac{4}{\zeta\omega_n} = 1.6 \text{ s}
\]
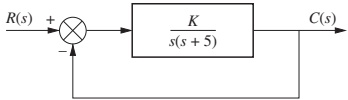
Example 5.4 – Gain Design for Transient Response
Problem: For system in Figure 5.16, choose gain \(K\) so that step response has 10% overshoot.
Closed-loop transfer function:
\[
T(s) = \frac{K}{s^{2} + 5s + K}
\]
Identify standard form:
- \(\omega_n^2 = K \Rightarrow \omega_n = \sqrt{K}\)
- \(2\zeta\omega_n = 5 \Rightarrow 2\zeta\sqrt{K} = 5 \Rightarrow \zeta = \dfrac{5}{2\sqrt{K}}\)
Percent overshoot depends only on \(\zeta\):
\[
\%OS = e^{-\zeta\pi/\sqrt{1-\zeta^{2}}}\times 100
\]
For \(\%OS = 10\%\), from standard tables or solving numerically: \(\zeta \approx 0.591\).
Set \(\zeta = 5/(2\sqrt{K}) = 0.591\):
\[
\sqrt{K} = \frac{5}{2\zeta} \approx \frac{5}{2 \times 0.591} \approx 2.667
\]
\[
K \approx 2.667^2 \approx 17.9
\]
So design result:
- Gain \(K \approx 17.9\) gives 10% overshoot.
This is a typical design workflow: Desired %OS → \(\zeta\) → \(K\) from the denominator coefficients.
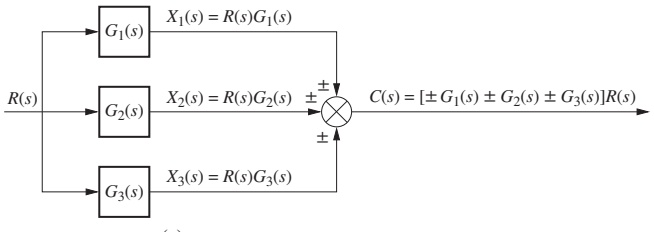
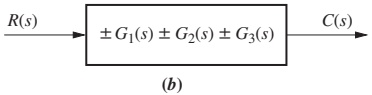
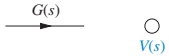
5.4 Signal-Flow Graphs – Another Representation
Key differences from block diagrams:
- Only nodes and directed branches:
- Node = signal.
- Branch = system/transfer function.
- Summation is implicit at each node:
- Node value = algebraic sum of incoming signals.
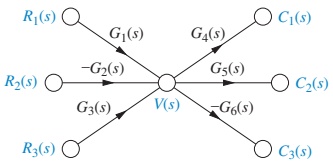
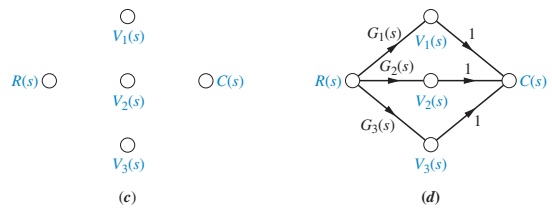
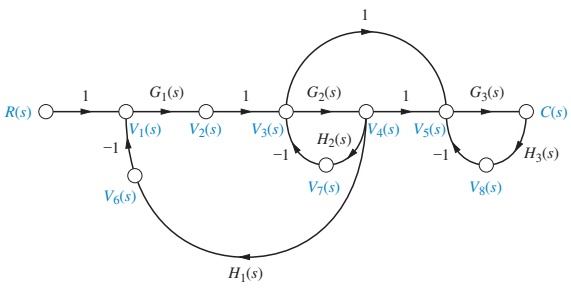
Example node equation from Figure 5.17(c):
\[
V(s) = R_1(s)G_1(s) - R_2(s)G_2(s) + R_3(s)G_3(s)
\]
Note: negative input is modeled by negative branch gain (e.g., \(-G_2(s)\)), not by a separate summing junction.
Signal-flow graphs are especially convenient:
- For state‑space (each state is a node).
- For using Mason’s Rule to find transfer functions.
FIGURE 5.18 – Building signal-flow graphs for cascade, parallel, and feedback forms.
5.5 Mason’s Rule – Transfer Function from a Signal-Flow Graph
Mason’s Rule gives the transfer function \(C(s)/R(s)\) directly from a signal-flow graph:
\[
G(s) = \frac{C(s)}{R(s)} = \frac{\displaystyle\sum_{k} T_k \Delta_k}{\Delta}
\]
Where:
\(T_k\): the k‑th forward-path gain from input node to output node.
\(\Delta\): the overall determinant of the graph, defined by:
\[
\Delta = 1
- \sum (\text{individual loop gains})
+ \sum (\text{products of loop gains in all nontouching loop pairs})
- \sum (\text{products of loop gains in all nontouching triplets})
+ \dots
\]
\(\Delta_k\): same as \(\Delta\), but excluding all loops that touch the k-th forward path.
Visualizing Loops and Forward Paths
- Forward path: \(R \to G_1 \to G_2 \to G_3 \to C\).
- Loops:
- Around \(X\) and \(Y\) via \(H_1(s)\).
- Around \(Y\) and \(C\) via \(H_2(s)\).
Use this simple structure to practice identifying loops and nontouching loops.
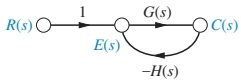
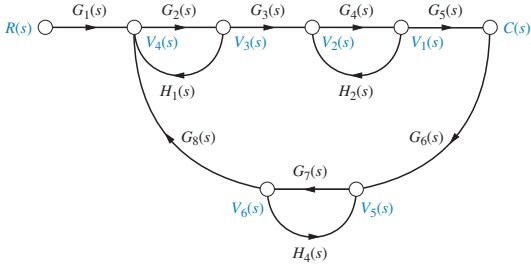
Example 5.7 – Mason’s Rule in Action
Problem: Find \(C(s)/R(s)\) for the signal-flow graph in Figure 5.21.
Example 5.7 – Step 1: Forward Path
There is one forward path:
- From input \(R(s)\) to output \(C(s)\).
Forward-path gain:
\[
T_1 = G_1(s) G_2(s) G_3(s) G_4(s) G_5(s)
\]
And one triple of nontouching loops:
- Loops 1, 2, and 3: \[
L_1 L_2 L_3 = G_2H_1G_4H_2G_7H_4
\]
No higher-order combinations.
Example 5.7 – Step 4: Compute Δ and Δ₁
Overall \(\Delta\):
\[
\begin{aligned}
\Delta = & \;1
- \big[ L_1 + L_2 + L_3 + L_4 \big] \\
& + \big[ L_1L_2 + L_1L_3 + L_2L_3 \big] \\
& - \big[ L_1L_2L_3 \big]
\end{aligned}
\]
Explicitly:
\[
\begin{aligned}
\Delta = & \;1
- \big[ G_2H_1 + G_4H_2 + G_7H_4 \\
& \quad + G_2G_3G_4G_5G_6G_7G_8 \big] \\
& + \big[ G_2H_1G_4H_2 + G_2H_1G_7H_4 + G_4H_2G_7H_4 \big] \\
& - \big[ G_2H_1G_4H_2G_7H_4 \big]
\end{aligned}
\]
Next, \(\Delta_1\) for the only forward path.
- Remove from \(\Delta\) any loops that touch the forward path nodes.
- From the figure, only loop 3 (with \(G_7H_4\)) does not touch the forward path.
So:
\[
\Delta_1 = 1 - G_7(s)H_4(s)
\]
Example 5.7 – Step 5: Final Transfer Function
Apply Mason’s formula:
\[
G(s) = \frac{C(s)}{R(s)}
= \frac{T_1 \Delta_1}{\Delta}
= \frac{[G_1G_2G_3G_4G_5]\,[1 - G_7H_4]}{\Delta}
\]
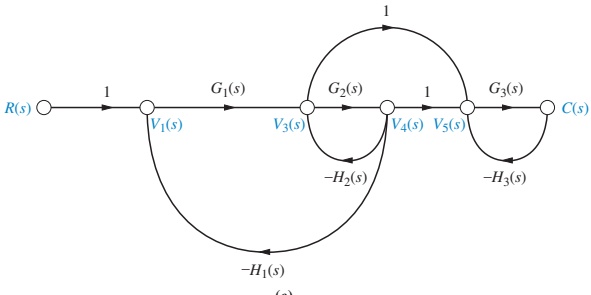
Skill-Assessment Exercise 5.4 – Mason vs. Block Reduction
Problem: Use Mason’s Rule to find the transfer function of the signal-flow graph of Figure 5.19(c).
- This is the same system as Example 5.2, reduced by block diagram algebra.
Answer:
\[
T(s) = \frac{G_{1}(s)G_{3}(s)\big[1 + G_{2}(s)\big]}%
{\big[1 + G_{2}(s)H_{2}(s) + G_{1}(s)G_{2}(s)H_{1}(s)\big]\big[1 + G_{3}(s)H_{3}(s)\big]}
\]
This demonstrates that:
- Block diagram reduction and Mason’s Rule are equivalent ways to get the same transfer function.
- You can pick whichever is more convenient for a given problem.
Summary / Key Points
- Block diagrams model interconnections of subsystems via blocks, summing junctions, and pickoffs.
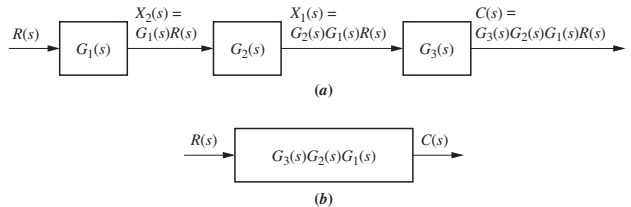
- Three key interconnection types:
- Cascade: multiply transfer functions (if no loading).
- Parallel: sum transfer functions.
- Feedback: \(G_{\text{CL}}(s) = \dfrac{G}{1 \pm GH}\).
- Block moves (across summing junctions and pickoffs) are essential to:
- Expose familiar forms.
- Systematically reduce complex diagrams.
- Feedback systems often reduce to second-order forms; then:
- Step response specs (%OS, \(T_s\), \(T_p\), etc.) are set by \(\zeta, \omega_n\).
- We can design gain \(K\) to meet transient performance requirements.
- Signal-flow graphs:
- Nodes = signals, branches = transfer functions.
- Make summing implicit, fit naturally with state-space.
- Mason’s Rule:
- Provides \(C/R\) in one formula from a signal-flow graph.
- Requires careful identification of loops and nontouching loops.
- Both block diagram reduction and Mason’s Rule ultimately yield the same transfer function.
Mason’s Rule
Live Practice: Cascade of Subsystems (No Loading)
Modify the transfer functions and see how the equivalent cascade behaves.
Live Practice: Parallel Combination
Experiment with a parallel combination of two subsystems and see their algebraic sum.
Interactive: Closed-Loop Gain from G and H
Play with forward-path and feedback gains and see the closed-loop gain.
We use the standard form:
\[
G_{\text{CL}}(s) = \frac{G(s)}{1 + G(s)H(s)}
\]
(assuming negative feedback).
Reactive: Overshoot vs. Damping Ratio ζ
Use the slider to change damping ratio \(\zeta\), and observe the predicted percent overshoot of a standard second-order system.
viewof zeta = Inputs.range([0.05, 1.2], {step: 0.05, label: "Damping ratio ζ"})
Reactive: Second-Order Step Response (ζ, ωₙ Sliders)
Explore how changing \(\zeta\) and \(\omega_n\) changes the step response of a standard second-order closed-loop system:
\[
T(s) = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2}
\]
viewof zeta2 = Inputs.range([0.1, 1.0], {step: 0.05, label: "Damping ratio ζ"})
viewof wn = Inputs.range([0.5, 10.0], {step: 0.5, label: "Natural frequency ωₙ (rad/s)"})
Reactive: Design K for 10% Overshoot (Example 5.4)
Here we revisit Example 5.4 interactively.
Recall:
\[
T(s) = \frac{K}{s^{2} + 5s + K}
\]
For a 10% overshoot, we want \(\zeta \approx 0.591\). Use the slider to choose K and see the resulting ζ and %OS.
viewof K = Inputs.range([1, 50], {step: 0.5, label: "Gain K"})
Reactive: Mason’s Rule – Simple Two-Loop Example
Consider a simple signal-flow graph with:
- Forward path gain \(T_1 = G_1 G_2\).
- A single feedback loop with loop gain \(L_1 = G_2 H\).
For this simple case, Mason’s rule gives:
\[
\Delta = 1 - L_1, \quad \Delta_1 = 1, \quad G(s) = \frac{T_1 \Delta_1}{\Delta}
= \frac{G_1 G_2}{1 - G_2 H}
\]
Use sliders to change \(G_1, G_2, H\) and observe the resulting transfer function.
viewof G1 = Inputs.range([0.1, 10], {step: 0.1, label: "G₁"})
viewof G2 = Inputs.range([0.1, 10], {step: 0.1, label: "G₂"})
viewof H = Inputs.range([0.0, 5], {step: 0.1, label: "H"})
Live Practice: Simple Block Moves as Algebra
Treat moving a gain G across a summing junction like factoring in algebra.
Consider:
\[
C(s) = G\big(R(s) - X(s)\big) \quad \text{vs.} \quad C(s) = GR(s) - GX(s)
\]