Transfer Functions with Gears, DC Motors, and Electric Analogs
Control 2.4
Why Gears Matter in Control Systems
Electric motors often do not directly match the desired load speed/torque.
Gears trade speed for torque:
Low gear (bike uphill): more torque, less speed.
High gear (flat road): more speed, less torque.
In control systems (robot joints, drives, antenna pointing, disk drives), gears help:
Increase torque to move heavy loads.
Reduce sensitivity to disturbances.
Achieve desired speed and resolution.
Gears are a mechanical transformer : they transform angular displacement and torque between shafts.
Use the bicycle analogy: most students have intuitive experience with it. Connect to robotics: servo motors with gearboxes, industrial robot arms. Point out that modeling gears correctly is critical when predicting speed response or required motor torque.
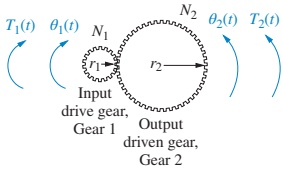
Ideal Gear Pair – Geometry and Displacement
Consider two meshed spur gears:
Gear 1: radius \(r_1\) , \(N_1\) teeth, angle \(\theta_1(t)\) , torque \(T_1(t)\)
Gear 2: radius \(r_2\) , \(N_2\) teeth, angle \(\theta_2(t)\) , torque \(T_2(t)\)
At the contact point, the tangential displacement must match:
\[
r_1 \theta_1 = r_2 \theta_2
\]
So the angular displacements are related by
\[
\frac{\theta_2}{\theta_1} = \frac{r_1}{r_2} = \frac{N_1}{N_2}
\]
Output angle is inversely proportional to gear radius / teeth. Larger output gear → smaller output angle for the same input angle.
Clarify that we are assuming no slip and ideal gear teeth. Backlash is ignored here: mention it but emphasize we are modeling the linearized, ideal relationship. Walk through why distances along circumferences must match for meshed gears. Point out that \(N\) is proportional to circumference, hence to radius.
Ideal Gear Pair – Torque Relationship
Assume lossless gears (no energy stored or lost in the teeth). Power in = power out.
Rotational work (energy) = torque × angular displacement:
\[
T_1 \theta_1 = T_2 \theta_2
\]
Using the displacement ratio
\[
\frac{\theta_2}{\theta_1} = \frac{N_1}{N_2}
\]
we get
\[
\frac{T_2}{T_1} = \frac{\theta_1}{\theta_2} = \frac{N_2}{N_1}
\]
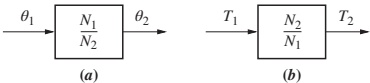
Angle ratio (from Gear 1 to Gear 2):
\[
\dfrac{\theta_2}{\theta_1} = \dfrac{N_1}{N_2}
\]
Torque ratio (from Gear 1 to Gear 2):
\[
\dfrac{T_2}{T_1} = \dfrac{N_2}{N_1}
\]
Gears invert the ratio:
Smaller angle → larger torque ,Larger angle → smaller torque .
Stress that this is like an ideal transformer: displacement and torque trade. Make sure students can interpret: a small pinion driving a large gear increases torque but reduces speed/angle. Point out that this is static relationship; dynamic effects involve inertia and damping behind each gear.
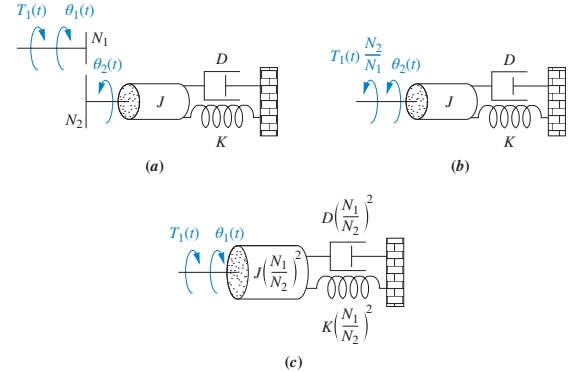
Reflecting Mechanical Impedances Through Gears
We often want to “remove” the gears from the diagram and reflect the load back to one shaft.
Consider a load inertia–damper–spring at Gear 2:
Inertia: \(J\)
Damping: \(D\)
Stiffness: \(K\)
From the gear relations and equations of motion, the equivalent system at \(\theta_1\) (input shaft) becomes
\[
\left[ J\left(\frac{N_1}{N_2}\right)^2 s^2
+ D\left(\frac{N_1}{N_2}\right)^2 s
+ K\left(\frac{N_1}{N_2}\right)^2 \right] \theta_1(s) = T_1(s)
\]
So each mechanical impedance term (inertia, damping, stiffness) is multiplied by \(\left(\dfrac{N_1}{N_2}\right)^2\) when reflected from Gear 2 back to Gear 1.
Walk through Figure 2.29(a) → (b) → (c): 1. Reflect input torque \(T_1\) to output using \(N_2/N_1\) . 2. Write equation at the output shaft. 3. Use the angle relation \(\theta_2 = (N_1/N_2)\theta_1\) to express in terms of \(\theta_1\) . Point out that all mechanical terms pick up the square of the gear ratio.
General Reflection Rule for Gears
General Rule: A rotational mechanical impedance (inertia, damping, stiffness) attached to a source shaft and reflected to a destination shaft is scaled by
\[
\left(
\frac{\text{Number of teeth of gear on destination shaft}}
{\text{Number of teeth of gear on source shaft}}
\right)^2
\]
Equivalently, using radii \(r\) :
\[
Z_\text{dest} = Z_\text{source} \left( \frac{r_\text{dest}}{r_\text{source}} \right)^2
\]
Think of gears as a mechanical impedance transformer : impedances scale with square of gear ratio, torques with first power of ratio, angles with inverse ratio .
Reinforce that “impedance” here means the coefficient that multiplies \(\theta\) , \(\dot{\theta}\) , or \(\ddot{\theta}\) in the Laplace domain: \(Js^2\) , \(Ds\) , \(K\) . Give a quick numeric check (e.g., \(N_1 = 20\) , \(N_2 = 40\) ) so students see magnitudes.
Example 2.21 – Lossless Gears: Concept
Problem: Find the transfer function \(G(s) = \dfrac{\theta_2(s)}{T_1(s)}\) for the rotational system with gears in Figure 2.30(a).
Key ideas:
Shafts are gear-coupled → motions are not independent → only one degree of freedom.
We reflect all input-side elements (\(J_1, D_1, T_1\) ) to the output shaft (Gear 2) to write a single equation.
Before showing equations, ask: “How many independent coordinates?” Students might initially think 2 (one for each inertia), but gears constrain motion → 1 DOF.
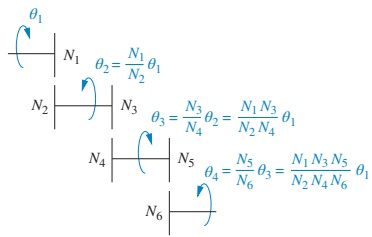
Gear Trains – Cascaded Gear Ratios
For large gear ratios, we use gear trains : multiple gear pairs in series.
From Figure 2.31,
\[
\theta_4 = \frac{N_1 N_3 N_5}{N_2 N_4 N_6}\, \theta_1
\]
So the equivalent gear ratio from \(\theta_1\) to \(\theta_4\) is
\[
\frac{\theta_4}{\theta_1} = \prod_{k} \left( \frac{N_{\text{driver},k}}{N_{\text{driven},k}} \right)
\]
For cascaded gear trains:
Overall displacement ratio = product of individual displacement ratios.Impedance reflection factors use the corresponding overall ratio (squared).
Point out the analogy to cascaded electrical transformers (turns ratios multiply). Remind students to keep track of which gear is driving and which is driven at each stage.
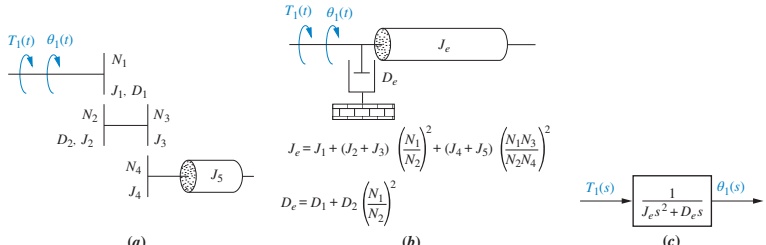
Example 2.22 – Gear Train with Losses: Concept
Problem: Find \(G(s) = \dfrac{\theta_1(s)}{T_1(s)}\) for the multi-stage gear system in Figure 2.32(a).
This time:
Gears are not lossless :
Gear inertias \(J_2, J_3, J_4, J_5\)
Damping \(D_2\) about intermediate shafts
We want a single equation at \(\theta_1\) (input shaft).
Strategy:
Reflect each inertia and damper to \(\theta_1\) using the appropriate gear ratios .
Ratios are different for each element, depending on how many gear stages they cross.
Highlight that the previous example was simpler (lossless gears). Here we explicitly model inertia in the gears and friction on shafts. Key idea: each element has its own effective gear ratio relative to the reference shaft.
Example 2.22 – Gear Train with Losses: Reflection
After reflecting all impedances to \(\theta_1\) :
Equivalent inertia at input:
\[
J_e = J_1
+ (J_2 + J_3)\left(\frac{N_1}{N_2}\right)^2
+ (J_4 + J_5)\left(\frac{N_1 N_3}{N_2 N_4}\right)^2
\]
Equivalent damping at input:
\[
D_e = D_1 + D_2\left(\frac{N_1}{N_2}\right)^2
\]
Resulting equation of motion:
\[
(J_e s^2 + D_e s)\theta_1(s) = T_1(s)
\]
So the transfer function is
\[
G(s) = \frac{\theta_1(s)}{T_1(s)} = \frac{1}{J_e s^2 + D_e s}
\]
Be meticulous: Each \(J\) and \(D\) may see zero, one, or two gear ratios. Compute the exact overall ratio from each element’s shaft to the reference shaft.
From Mechanical to Electromechanical
So far we modeled:
Purely mechanical rotational systems (with gears).
Now we extend to electromechanical systems :
Electrical input (voltage, current)
Mechanical output (shaft rotation, speed, torque)
Applications in ECE:
Robot arm joints
Antenna pointing systems
Disk and tape drive actuators
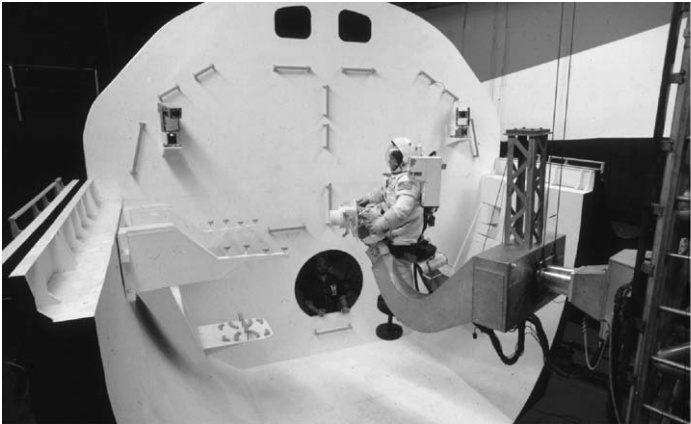
Flight simulators and haptic devices
Emphasize that once we get a transfer function for the motor+load, we can design controllers in exactly the same way as for previous mechanical systems. Use Figure 2.34 to illustrate a sophisticated real system built up from the same building blocks.
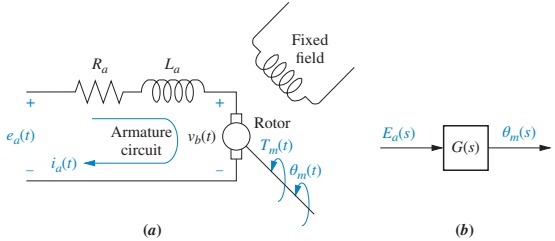
Motor Armature Circuit and Back EMF
Electrical loop around the armature:
Armature resistance: \(R_a\)
Armature inductance: \(L_a\)
Back EMF: \(V_b(s)\)
Applied voltage: \(E_a(s)\)
Kirchhoff’s voltage law:
\[
R_a I_a(s) + L_a s I_a(s) + V_b(s) = E_a(s)
\]
Substitute \(V_b(s) = K_b s \theta_m(s)\) and \(I_a(s) = \dfrac{1}{K_t} T_m(s)\) to couple the electrical and mechanical domains.
The back EMF \(V_b\) acts like a negative feedback in the motor:
Faster rotation → larger \(V_b\) → reduces armature current → limits torque.
Explain that this is why DC motors naturally resist sudden load changes to some extent: the back EMF changes current. Prepare students to plug in the mechanical dynamics next.
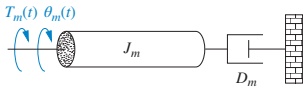
Mechanical Loading of the Motor
Mechanical side (shaft dynamics):
Equivalent inertia at armature: \(J_m\)
Equivalent viscous damping: \(D_m\)
Equation in Laplace domain:
\[
T_m(s) = (J_m s^2 + D_m s)\, \theta_m(s)
\]
This \(J_m\) and \(D_m\) include both:
Motor’s own inertia and damping.
Load inertia and damping reflected through gear(s) to the armature shaft.
Connect back to earlier gear reflection: \(J_m\) and \(D_m\) are computed using those formulas. This unifies mechanical modeling with the electrical motor model.
Rearrange:
\[
\left[\frac{R_a}{K_t} (J_m s + D_m) + K_b \right] s \theta_m(s) = E_a(s)
\]
So the transfer function is
\[
\frac{\theta_m(s)}{E_a(s)}
= \frac{K_t/(R_a J_m)}{s\left[s + \frac{1}{J_m}
\left(D_m + \frac{K_t K_b}{R_a}\right)\right]}
\]
or in simplified form
\[
\frac{\theta_m(s)}{E_a(s)} = \frac{K}{s(s + \alpha)}
\]
A DC motor (with this approximation) behaves like:
One integrator (from speed to position), andOne stable first-order pole (electromechanical time constant).
Interpret \(K\) as the static gain from voltage to position velocity integrated. Interpret \(\alpha\) as related to the effective damping: larger \(D_m\) or stronger electrical damping (large \(K_t K_b/R_a\) ) → faster \(\alpha\) (shorter time constant).
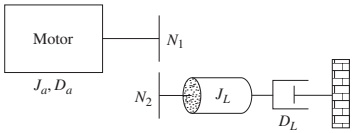
Including the Gear and Load – Effective \(J_m\) and \(D_m\)
Consider a motor with armature inertia \(J_a\) and damping \(D_a\) , driving a load of inertia \(J_L\) and damping \(D_L\) through a gear pair with ratio \(N_1:N_2\) (armature:load):
Reflect \(J_L\) and \(D_L\) to the armature:
\[
J_m = J_a + J_L\left(\frac{N_1}{N_2}\right)^2
\]
\[
D_m = D_a + D_L\left(\frac{N_1}{N_2}\right)^2
\]
Use these \(J_m\) and \(D_m\) in the DC motor transfer function
\[
\frac{\theta_m(s)}{E_a(s)}
= \frac{K_t/(R_a J_m)}{s\left[s + \frac{1}{J_m}
\left(D_m + \frac{K_t K_b}{R_a}\right)\right]}
\]
Ask: “What happens to \(J_m\) if we use a large gear reduction (\(N_1 \ll N_2\) )?” → The reflected load inertia shrinks significantly, which is one reason high gear ratios are helpful when driving heavy loads.
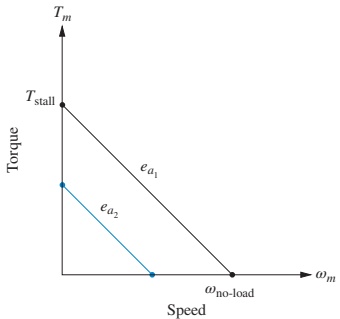
Determining Electrical Constants via Torque–Speed Curves
Start from the DC motor steady-state equation (with \(L_a=0\) ):
\[
\frac{R_a}{K_t}T_m(s) + K_b s \theta_m(s) = E_a(s)
\]
Inverse Laplace and assume DC (steady-state) operation:
\[
\frac{R_a}{K_t}T_m + K_b \omega_m = e_a
\]
Solve for torque:
\[
T_m = -\frac{K_b K_t}{R_a}\omega_m
+ \frac{K_t}{R_a} e_a
\]
This is a straight line in the torque–speed plane:
Intercept at \(\omega_m = 0\) : stall torque
\[
T_{\text{stall}} = \frac{K_t}{R_a}e_a
\]
Intercept at \(T_m = 0\) : no-load speed
\[
\omega_{\text{no-load}} = \frac{e_a}{K_b}
\]
Thus
\[
\frac{K_t}{R_a} = \frac{T_{\text{stall}}}{e_a},
\quad
K_b = \frac{e_a}{\omega_{\text{no-load}}}
\]
A dynamometer test (measuring stall torque and no-load speed for a given \(e_a\) ) gives the motor constants needed in the transfer function.
Emphasize that this is practical: in lab or data sheets, motors are often specified by stall torque and no-load speed. Relate to Virtual Experiment 2.2.
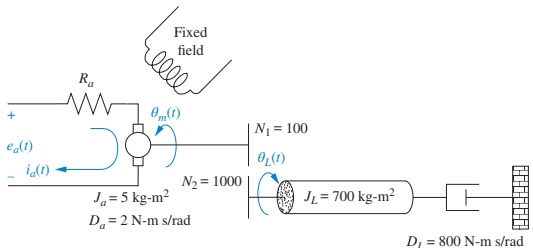
Example 2.23 – DC Motor and Load
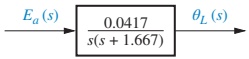
Problem: Given the DC motor, load, gear ratio, and torque–speed curve in Figure 2.39, find \(G(s) = \dfrac{\theta_L(s)}{E_a(s)}\) .
Example 2.23 – DC Motor and Load
Step 1: Mechanical Constants
From the data:
\[
J_m = J_a + J_L\left(\frac{N_1}{N_2}\right)^2
= 5 + 700\left(\frac{1}{10}\right)^2 = 12
\]
\[
D_m = D_a + D_L\left(\frac{N_1}{N_2}\right)^2
= 2 + 800\left(\frac{1}{10}\right)^2 = 10
\]
From the torque–speed curve:
Stall torque: \(T_{\text{stall}} = 500\)
No-load speed: \(\omega_{\text{no-load}} = 50\)
Input voltage: \(e_a = 100\)
Pause to check units (e.g., N·m·s/rad for damping, kg·m² for inertia). Emphasize again the square of the gear ratio.
Example 2.23 – DC Motor and Load
Then
\[
\frac{K_t}{R_a} = \frac{T_{\text{stall}}}{e_a}
= \frac{500}{100} = 5
\]
\[
K_b = \frac{e_a}{\omega_{\text{no-load}}}
= \frac{100}{50} = 2
\]
Plug into the motor transfer function:
\[
\frac{\theta_m(s)}{E_a(s)}
= \frac{5/12}{s\left\{s + \frac{1}{12}[10 + (5)(2)]\right\}}
= \frac{0.417}{s(s + 1.667)}
\]
Use gear ratio \(\dfrac{N_1}{N_2} = \dfrac{1}{10}\) to get load angle:
\[
\frac{\theta_L(s)}{E_a(s)}
= \frac{0.0417}{s(s + 1.667)}
\]
Notice: The poles (dynamics) do not change with this simple gear scaling; the gear changes only the output gain between \(\theta_m\) and \(\theta_L\) .
Clarify that, strictly, changing gear ratio would change \(J_m\) and \(D_m\) , thus affecting poles. Here, the ratio used in reflecting load and the ratio used for angle appear separately, but we’re using the specific given data, so the final dynamics come out as shown.
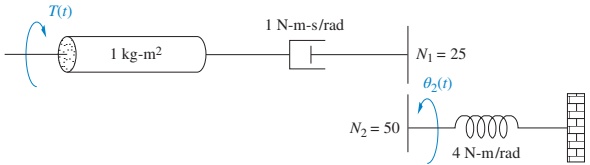
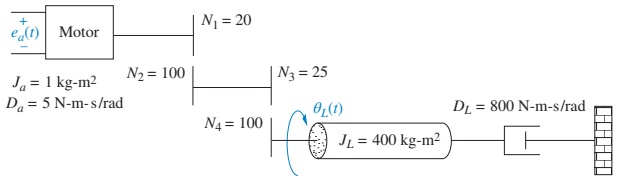
Skill-Assessment 2.11 – Motor + Gear + Load
Problem: For the electromechanical system shown in Figure 2.40, with torque–speed curve
\[
T_m = -8\omega_m + 200
\]
at \(e_a = 100\ \text{V}\) , find
\[
G(s) = \frac{\theta_L(s)}{E_a(s)}
\]
Motivate by saying: If you are stronger in circuits than in mechanics, analogs can make mechanical modeling easier. Also, analogs appear historically in early analog computers, which solved differential equations using electrical networks.
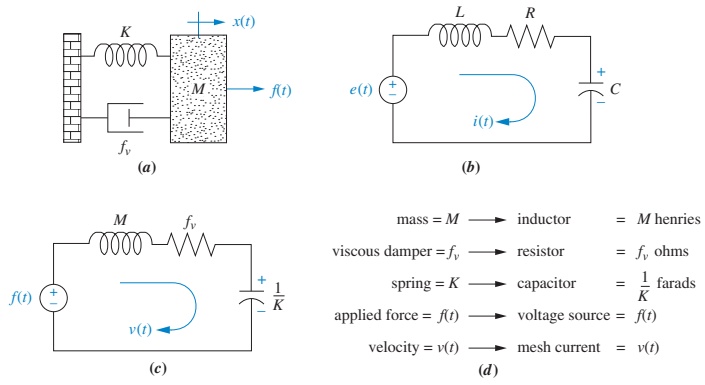
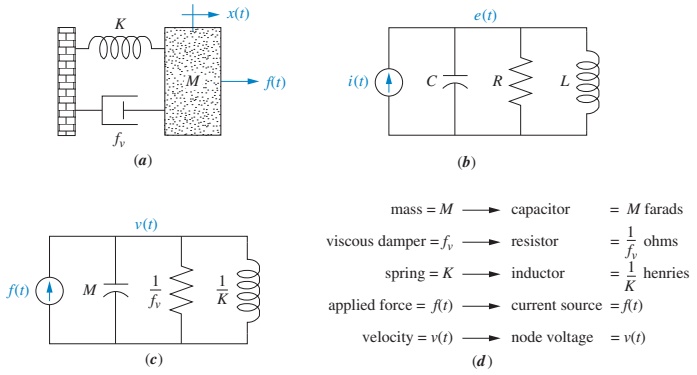
Series Analog – Single Mass–Spring–Damper
Equation of motion (Laplace, displacement):
\[
(M s^2 + f_v s + K) X(s) = F(s)
\]
To match with current-based mesh equations, rewrite in terms of velocity \(V(s) = s X(s)\) :
\[
\left(M s + f_v + \frac{K}{s}\right) V(s) = F(s)
\]
Electrical series RLC mesh:
\[
(L s + R + \frac{1}{C s}) I(s) = E(s)
\]
Analog mapping (series type):
Velocity \(V(s)\) ↔︎ Current \(I(s)\)
Force \(F(s)\) ↔︎ Voltage \(E(s)\)
Mass \(M\) ↔︎ Inductance \(L\)
Viscous damping \(f_v\) ↔︎ Resistance \(R\)
Spring constant \(K\) ↔︎ Inverse of capacitance \(1/C\)
In a series analog , mechanical impedances map onto series electrical impedances.
Students often confuse which quantity maps to current vs. voltage. Stress: here, velocity ↔︎ current because both appear multiplied by total impedance in the equations.
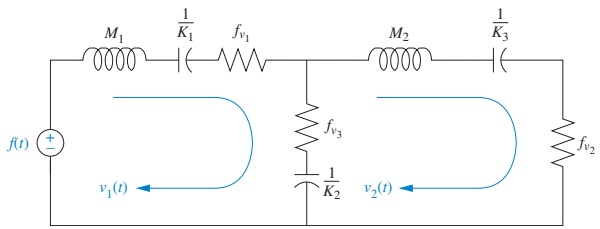
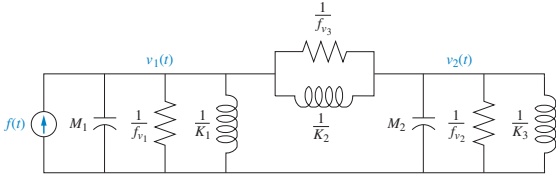
Series Analog – Multi-Mass System (Example 2.24)
Problem: Draw a series analog for the mechanical system of Figure 2.17(a).
Mechanical equations (after converting to velocity):
\[
\left[M_1 s + (f_{v_1}+f_{v_3}) + \frac{K_1+K_2}{s}\right]V_1(s)
- \left(f_{v_3}+\frac{K_2}{s}\right)V_2(s) = F(s)
\]
\[
-\left(f_{v_3}+\frac{K_2}{s}\right)V_1(s)
+ \left[M_2 s+(f_{v_2}+f_{v_3})+\frac{K_2+K_3}{s}\right]V_2(s) = 0
\]
Coefficients correspond to sums of series impedances:
Impedances tied to motion of \(M_1\) → first mesh.
Impedances between \(M_1\) and \(M_2\) → shared between both meshes.
Impedances tied to \(M_2\) → second mesh.
Result:
Point out which inductor, resistor, capacitor corresponds to each mechanical element. This reinforces the mapping in a more complex context.
Parallel Analog – Single Mass–Spring–Damper
Now we match with nodal equations instead of mesh equations.
Electrical parallel RLC node:
\[
\left(C s + \frac{1}{R} + \frac{1}{L s}\right) E(s) = I(s)
\]
Mechanical equation in velocity form:
\[
\left(M s + f_v + \frac{K}{s}\right) V(s) = F(s)
\]
If we identify - Velocity \(V(s)\) ↔︎ Voltage \(E(s)\) - Force \(F(s)\) ↔︎ Current \(I(s)\) then
\(M\) ↔︎ \(1/L\) (since \(1/(L s)\) term aligns with mass term when seen as admittance)\(f_v\) ↔︎ \(1/R\) \(K\) ↔︎ \(C\)
In a parallel analog , - Velocity ↔︎ voltage , - Force ↔︎ current , - Mechanical admittances map onto electrical admittances.
Clarify that the mapping is different from the series analog, but both are valid. Choice depends on whether you prefer mesh or nodal methods, or on the type of circuit simulator used.
Parallel Analog – Multi-Mass System (Example 2.25)
Problem: Draw a parallel analog for the mechanical system of Figure 2.17(a).
Starting from the same mechanical equations (in velocity form), interpret each coefficient as a sum of admittances :
Admittances associated with \(M_1\) connect to node 1 .
Admittances between \(M_1\) and \(M_2\) connect between node 1 and node 2.
Admittances associated with \(M_2\) connect to node 2 .
Resulting parallel analog:
Highlight that the graph structure (two nodes plus interconnection admittance) closely mirrors the mechanical layout of two masses and a coupling spring/damper.
Summary / Key Points
Gears :
\(\dfrac{\theta_2}{\theta_1} = \dfrac{N_1}{N_2}\) , \(\dfrac{T_2}{T_1} = \dfrac{N_2}{N_1}\) .Mechanical impedances reflect through gears with the square of gear ratio.
Gear trains multiply individual ratios to get an overall ratio.
Rotational systems with gears :
Reflect all load impedances to a single shaft; then write one equation of motion.
Transfer functions look like standard 1st or 2nd order forms with effective \(J\) , \(D\) , \(K\) .
DC motor modeling :
Electrical: \(R_a I_a + L_a s I_a + K_b s \theta_m = E_a\) .
Mechanical: \(T_m = (J_m s^2 + D_m s)\theta_m\) , \(T_m = K_t I_a\) .
Combined TF (ignoring \(L_a\) ): \(\dfrac{\theta_m}{E_a} = \dfrac{K_t/(R_a J_m)}{s\left[s + \dfrac{1}{J_m}\left(D_m + \dfrac{K_t K_b}{R_a}\right)\right]}\) .
Torque–speed curves :
Provide \(K_t/R_a\) and \(K_b\) via stall torque and no-load speed.
Electric circuit analogs :
Series analog : velocity ↔︎ current, force ↔︎ voltage; impedances in series.Parallel analog : velocity ↔︎ voltage, force ↔︎ current; admittances in parallel.
Use this slide to connect all topics: gears → reflected impedances → DC motor with load → circuit analogs. Highlight how transfer function derivation is systematic: 1. Write physics-based equations. 2. Reflect through gears if needed. 3. Solve for output over input in Laplace domain.
DC motor relationships:
Back EMF:
\[
v_b(t) = K_b \omega_m(t), \quad V_b(s) = K_b s \theta_m(s)
\]
Torque–current:
\[
T_m(s) = K_t I_a(s)
\]
Armature circuit (Laplace):
\[
R_a I_a(s) + L_a s I_a(s) + K_b s \theta_m(s) = E_a(s)
\]
Mechanical load at armature:
\[
T_m(s) = (J_m s^2 + D_m s)\theta_m(s)
\]
Effective inertia/damping (with gear ratio \(N_1:N_2\) ):
\[
J_m = J_a + J_L\left(\frac{N_1}{N_2}\right)^2, \quad
D_m = D_a + D_L\left(\frac{N_1}{N_2}\right)^2
\]
Transfer function (neglect \(L_a\) ):
\[
\frac{\theta_m(s)}{E_a(s)}
= \frac{K_t/(R_a J_m)}{s\left[s + \frac{1}{J_m}
\left(D_m + \frac{K_t K_b}{R_a}\right)\right]}
\]
Torque–speed curve quantities:
Stall torque:
\[
T_{\text{stall}} = \frac{K_t}{R_a} e_a
\]
No-load speed:
\[
\omega_{\text{no-load}} = \frac{e_a}{K_b}
\]
Electrical constants:
\[
\frac{K_t}{R_a} = \frac{T_{\text{stall}}}{e_a}, \quad
K_b = \frac{e_a}{\omega_{\text{no-load}}}
\]
Electric analog mappings (summary):
Series analog (mesh):
Velocity \(V\) ↔︎ Current \(I\)
Force \(F\) ↔︎ Voltage \(E\)
\(M\) ↔︎ \(L\) , \(f_v\) ↔︎ \(R\) , \(K\) ↔︎ \(1/C\) Parallel analog (node):
Velocity \(V\) ↔︎ Voltage \(E\)
Force \(F\) ↔︎ Current \(I\)
\(M\) ↔︎ \(1/L\) , \(f_v\) ↔︎ \(1/R\) , \(K\) ↔︎ \(C\)
Encourage students to keep this formula sheet handy while working on problem sets involving gears and DC motors.
Using This Interactive Deck
This addendum lets you experiment with gears, DC motors, and analogs using live Python (Pyodide) and Observable JS (OJS) directly in the browser.
You can:
Change gear tooth counts and see how angles and torques change.
Explore how reflected inertia changes with gear ratio.
Visualize DC motor step responses as you vary parameters.
See how motor torque–speed lines depend on motor constants.
Change the sliders and code, then click Run Code in the Python cells to see how the system behavior changes in real time.
Explain to students that this deck is meant for experimentation, not just passive viewing. Emphasize that they don’t need a local Python installation; everything runs in the browser via Pyodide.
1. Interactive Code – Gear Ratios (Static Relationships)
Play with the basic gear formulas:
\(\displaystyle \frac{\theta_2}{\theta_1} = \frac{N_1}{N_2}\) \(\displaystyle \frac{T_2}{T_1} = \frac{N_2}{N_1}\)
Try:
Make \(N_1 < N_2\) (gear reduction).
Make \(N_1 > N_2\) (gear up). Observe how angle and torque ratios swap.
Encourage students to interpret the printed ratios physically. Ask: what does it mean if \(T_2/T_1 = 2\) but \(\theta_2/\theta_1 = 0.5\) ?
2. Reactive Visualization – Gear Impedance Reflection
We know that when reflecting a load inertia \(J_L\) through a gear ratio,
\[
J_\text{reflected} = J_L \left(\frac{N_\text{dest}}{N_\text{source}}\right)^2
\]
Use the sliders to see how reflected inertia changes with gear ratio.
= Inputs. range ([5 , 100 ], {step : 1 , label : "N_source (source shaft teeth)" })= Inputs. range ([5 , 100 ], {step : 1 , label : "N_dest (destination shaft teeth)" })= Inputs. range ([0.01 , 10 ], {step : 0.01 , label : "Load inertia J_L (kg·m²)" })
Interpretation:
Fix \(J_L\) and \(N_\text{source}\) , vary \(N_\text{dest}\) .
Larger \(N_\text{dest}\) (bigger gear at destination) → larger reflected inertia at the source.
Point out that this explains why high reductions can make the motor “feel” a lighter or heavier load depending on direction of reflection.
3. Interactive Code – Gear Train Overall Ratio
Experiment with a 3-stage gear train like in Figure 2.31.
We use
\[
\theta_4 = \frac{N_1 N_3 N_5}{N_2 N_4 N_6} \theta_1
\]
Modify the \(N\) values to see how cascading several modest ratios can create a large overall reduction.
You can ask students: what combination of modest stage ratios gives about 100:1 total reduction? This ties to practical gear train design in robotics.
4. Reactive DC Motor – Step Response vs. Parameters
We model the DC motor (position output) as
\[
\frac{\theta_m(s)}{E_a(s)} = \frac{K}{s(s + \alpha)}
\]
where
\(K = \dfrac{K_t}{R_a J_m}\) \(\alpha = \dfrac{1}{J_m}\left(D_m + \dfrac{K_t K_b}{R_a}\right)\)
Use sliders to vary \(K\) and \(\alpha\) and see the step response.
= Inputs. range ([0.01 , 1 ], {step : 0.01 , label : "K (position gain)" })= Inputs. range ([0.1 , 10 ], {step : 0.1 , label : "α (1/s)" })= Inputs. range ([1 , 10 ], {step : 0.5 , label : "Simulation time (s)" })
Observations:
Larger \(\alpha\) → faster response (more damping/electrical braking).
Larger \(K\) → greater steady-state slope (more motion per volt).
Relate \(\alpha\) changes to increasing \(D_m\) or electrical damping \(\frac{K_t K_b}{R_a}\) . Ask students to find parameter pairs that yield an overshoot-free, “fast enough” response.
5. Reactive DC Motor – Torque–Speed Line Explorer
We derived the steady-state torque–speed relationship:
\[
T_m = -\frac{K_b K_t}{R_a}\,\omega_m + \frac{K_t}{R_a} e_a
\]
Use sliders to vary \(K_t/R_a\) , \(K_b\) , and \(e_a\) and see the line.
= Inputs. range ([0.1 , 10 ], {step : 0.1 , label : "K_t / R_a" })= Inputs. range ([0.1 , 10 ], {step : 0.1 , label : "K_b" })= Inputs. range ([10 , 200 ], {step : 10 , label : "Applied voltage e_a (V)" })
Questions to explore:
What happens to the line if you double \(e_a\) ?
How does increasing \(K_b\) (stronger back EMF) change no-load speed and slope?
How does increasing \(K_t/R_a\) change stall torque?
Connect this back to Example 2.23: identify \(T_{\text{stall}}\) and \(\omega_{\text{no-load}}\) from a given line and recover \(K_t/R_a\) and \(K_b\) .
6. Interactive Code – Compute \(J_m\) and \(D_m\) with Gears
Given
\[
J_m = J_a + J_L\left(\frac{N_1}{N_2}\right)^2, \quad
D_m = D_a + D_L\left(\frac{N_1}{N_2}\right)^2
\]
experiment with different gear ratios and load values.
Try changing \(N_1/N_2\) to 1/5, 1/10, 1/20, etc. Observe how \(J_m\) and \(D_m\) scale with the square of the gear ratio.
Encourage students to reflect: a higher reduction (smaller \(N_1/N_2\) ) “lightens” the load as seen by the motor. This is crucial when selecting a motor for a heavy robotic joint.
7. Reactive – First-Order Mechanical Load via Gear Ratio
We can visualize how gear ratio affects a first-order load dynamics in angle:
\[
G(s) = \frac{\theta(s)}{T(s)} = \frac{1}{J_\text{eff} s^2 + D_\text{eff} s}
\]
where \(J_\text{eff}, D_\text{eff}\) depend on gear ratio.
= Inputs. range ([1 , 20 ], {step : 1 , label : "N1 (motor gear teeth)" })= Inputs. range ([1 , 50 ], {step : 1 , label : "N2 (load gear teeth)" })= Inputs. range ([10 , 1000 ], {step : 10 , label : "Load inertia J_L" })= Inputs. range ([10 , 1000 ], {step : 10 , label : "Load damping D_L" })
This is a rough approximation , but it illustrates:
Larger reflected \(J_m\) → slower angle response.
Larger reflected \(D_m\) → more damping, shorter transient.
Make it clear that the model here is simplified for pedagogy. The key point is qualitative: gear ratio shapes the effective inertia/damping and thus the time response.
8. Interactive – Series Analog Parameter Mapping
Recall series analog mapping (single-DOF translational):
\(M\) ↔︎ \(L\) , \(f_v\) ↔︎ \(R\) , \(K\) ↔︎ \(1/C\)
Try mapping a given mechanical system to RLC values.
Modify \(M\) , \(f_v\) , and \(K\) . Think about how a heavier mass translates to larger inductance , and stiffer spring to a smaller capacitance.
You can ask students: if you double the mass, which electrical parameter doubles? If you want to simulate a very stiff spring, what happens to \(C\) ?
9. Reactive – Parallel Analog Admittance Matching
For the parallel analog, the mapping is (single-DOF):
\(M\) ↔︎ \(1/L\) , \(f_v\) ↔︎ \(1/R\) , \(K\) ↔︎ \(C\)
Use sliders to see electrical parameters for a given mechanical system.
= Inputs. range ([0.5 , 10 ], {step : 0.5 , label : "Mass M" })= Inputs. range ([0.5 , 10 ], {step : 0.5 , label : "Damping f_v" })= Inputs. range ([5 , 200 ], {step : 5 , label : "Stiffness K" })
Compare this to the series analog mapping:
Here, mass → inverse inductance ; in series analog, mass → inductance. This is why we call this an admittance-based (parallel) analog.
Highlight that both analogs are mathematically valid; the choice is driven by convenience and the desired circuit topology.