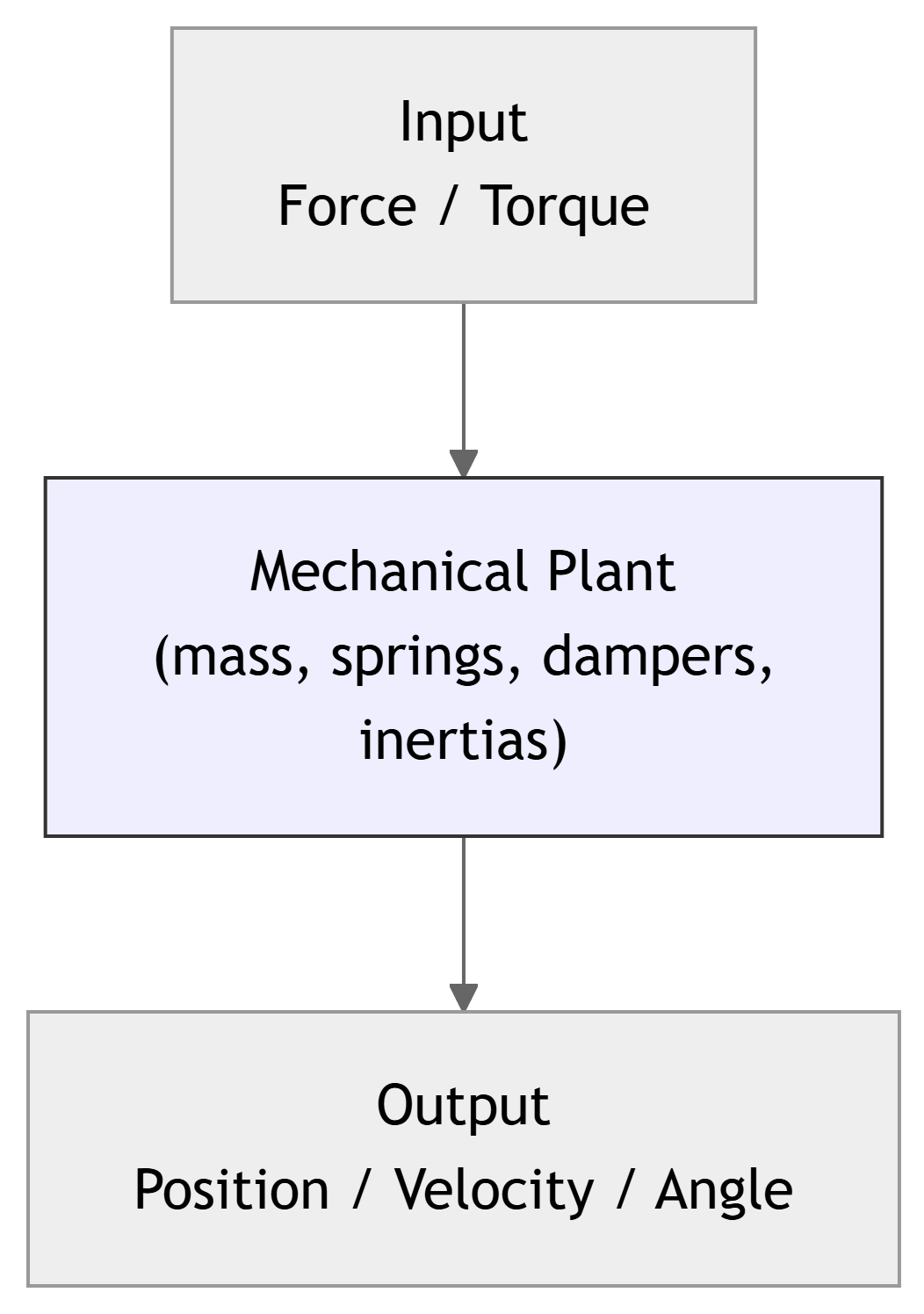
Big Picture: Why We Care
Control systems in ECE often involve mechanics:
Hard disk drive head positioning (rotational + translational).
3D printer or CNC axis control.
Automotive suspensions (sprung mass).
Robotics joints with flexible couplings.
To design controllers , we need transfer functions that describe how motion responds to forces/torques.
We will show that mechanical systems can be modeled just like electrical RLC circuits , enabling us to reuse circuit techniques.
Connect this to their intuition: cars bouncing, drones tilting, motors driving loads. Emphasize: once we have \(G(s)\) , all the Laplace/transfer function tools (stability, step responses, Bode plots) become available.
Review: Transfer Functions
For any linear time-invariant (LTI) system with zero initial conditions:
\[
G(s) = \frac{Y(s)}{U(s)}
\]
where
\(U(s)\) = Laplace transform of input\(Y(s)\) = Laplace transform of output
In circuits, examples:
\(G(s) = \dfrac{V_{\text{out}}(s)}{V_{\text{in}}(s)}\) \(G(s) = \dfrac{I_{\text{out}}(s)}{V_{\text{in}}(s)}\)
In mechanical systems, we will see examples like:
\(G(s) = \dfrac{X(s)}{F(s)}\) (displacement per force)\(G(s) = \dfrac{\theta(s)}{T(s)}\) (angle per torque)
Remind them that the procedure is: 1. Write differential equation(s) from physics. 2. Laplace transform (zero ICs). 3. Solve algebraically for output over input to get \(G(s)\) .
We now do this for mechanical systems.
Translational Element Equations (Time Domain)
Table 2.4 (time-domain relations)
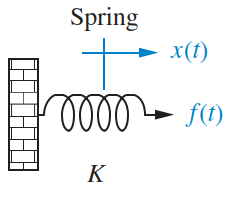
Spring
\(f(t) = K \displaystyle\int_{0}^{t} v(\tau)\, d\tau\) \(f(t) = K x(t)\)
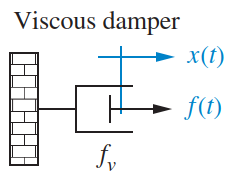
Viscous damper
\(f(t) = f_v v(t)\) \(f(t) = f_v \dfrac{dx(t)}{dt}\)
Mass
\(f(t) = M \dfrac{dv(t)}{dt}\) \(f(t) = M \dfrac{d^2 x(t)}{dt^2}\)
Units recap:
\(f(t)\) – N (newtons)\(x(t)\) – m (meters)\(v(t)\) – m/s\(K\) – N/m\(f_v\) – N·s/m\(M\) – kg (= N·s²/m)
Emphasize two equivalent descriptions:
In terms of velocity (left column) – closer to circuit analogies where current is “rate of charge”.
In terms of displacement (right column) – more convenient because we often care about position.
We will primarily work with displacement-based equations.
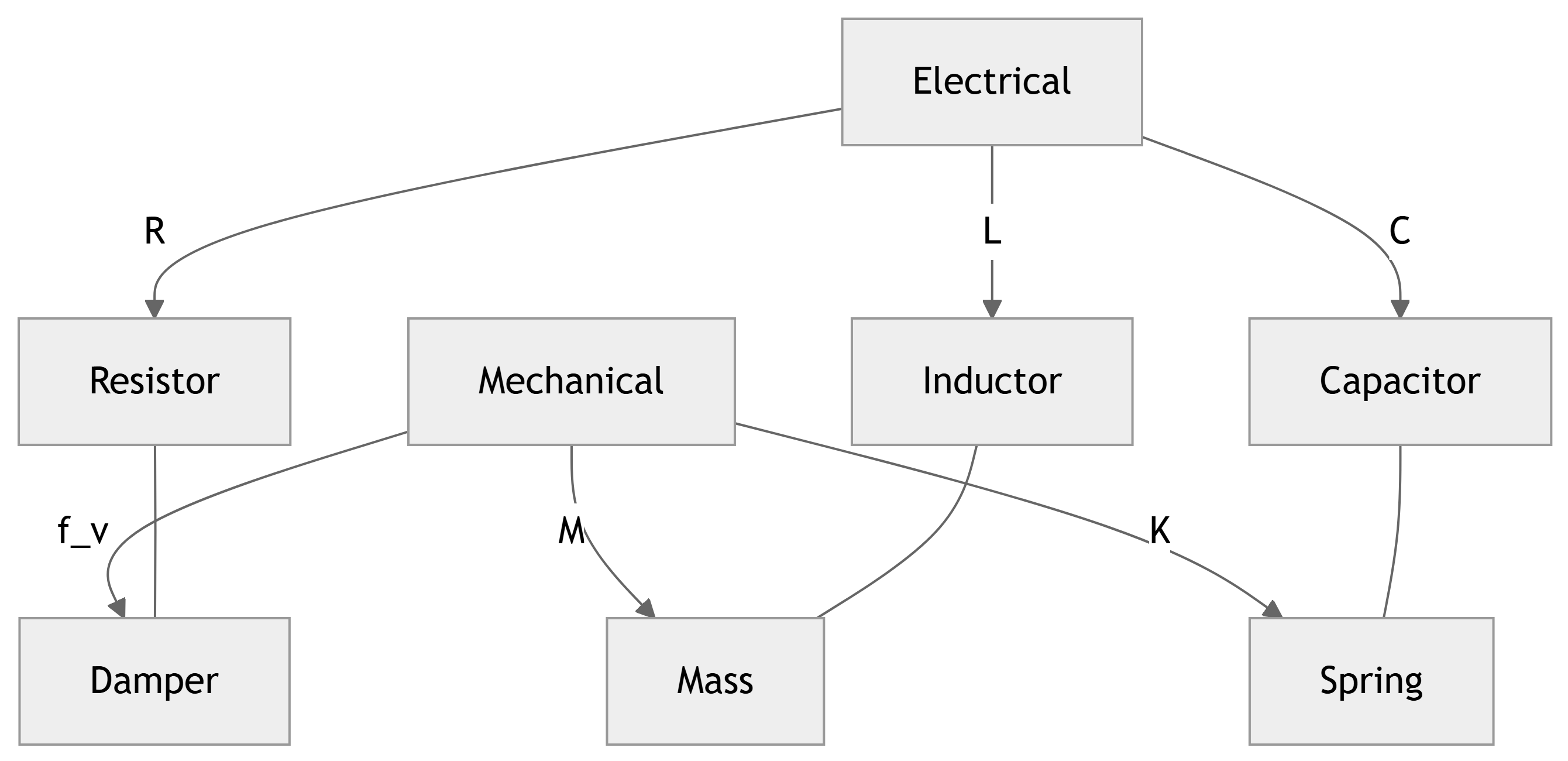
Electrical–Mechanical Analogies (Mesh-Style)
From comparing mechanical and electrical tables:
Mechanical force \(f\) ↔︎ Electrical voltage \(v\)
Mechanical velocity \(v\) ↔︎ Electrical current \(i\)
Mechanical displacement \(x\) ↔︎ Electrical charge \(q\)
Element analogies (this “mesh-style” view):
Spring ↔︎ Capacitor
Viscous damper ↔︎ Resistor
Mass ↔︎ Inductor
Implication:
Summing forces (in terms of velocity) ↔︎ Summing voltages (in terms of current)
Equations look like mesh equations in circuits.
There is also a force–current analogy (node-style), but in this section we mainly use the force–voltage analogy.
Clarify: “analogous” means the equations look the same, not that the physics are identical. The analogy is useful for reusing circuit methods (mesh equations, impedances, etc.).
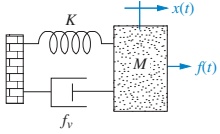
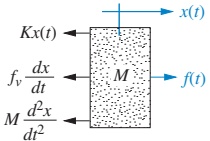
1‑DOF Translational: Free-Body Diagram
For motion assumed to the right :
Applied force \(f(t)\) acts to the right.
Spring force \(Kx(t)\) acts left (restoring).
Damper force \(f_v \dfrac{dx}{dt}\) acts left (opposes motion).
Inertial force \(M \dfrac{d^2x}{dt^2}\) (mass × acceleration) effectively appears on left side of the equation.
Equation from Newton’s law (sum of forces = \(M\ddot{x}\) ):
\[
M\frac{d^{2}x(t)}{dt^{2}}+f_{v}\frac{dx(t)}{dt}+Kx(t)=f(t)
\]
Show sign reasoning explicitly:
Write \(\Sigma f = M \ddot{x}\) with directions.
Rearranged, this yields “all impedance-like terms times \(x(t)\) equals applied force”.
This is their first “mechanical differential equation of motion” in the course.
1‑DOF Translational: Transfer Function
Take Laplace transform with zero initial conditions:
\[
M s^{2}X(s)+f_{v}s X(s)+K X(s)=F(s)
\]
Factor \(X(s)\) :
\[
(M s^{2}+f_{v}s+K)X(s)=F(s)
\]
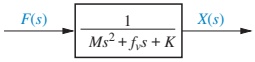
Transfer function:
\[
G(s) = \frac{X(s)}{F(s)}=\frac{1}{Ms^{2}+f_{v}s+K}
\]
Block diagram (Figure 2.15(b)):
Mechanical Impedance: Shortcut in the \(s\) ‑Domain
From Table 2.4, taking Laplace transforms:
Spring: \[
F(s)=K X(s) \Rightarrow Z_M(s) = \frac{F(s)}{X(s)} = K
\]
Damper: \[
F(s)=f_{v}s X(s) \Rightarrow Z_M(s) = f_v s
\]
Mass: \[
F(s)=M s^{2}X(s) \Rightarrow Z_M(s) = Ms^2
\]
Define mechanical impedance :
\[
Z_{M}(s)=\frac{F(s)}{X(s)}
\]
Once each element has \(Z_M(s)\) , we can skip writing the differential equation , just like in AC circuit analysis with impedances.
Emphasize that \(Z_M\) captures how “hard it is” to move the system at frequency \(s\) . Reinforce that \(Z_M\) is linear in the Laplace domain, enabling algebraic solutions.
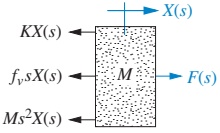
1‑DOF Translational: Impedance Picture
From the FBD, in the \(s\) ‑domain each force is of the form
\[
F(s) = Z_M(s) X(s)
\]
So in Figure 2.16(b):
We get directly:
\[
[Ms^{2}+f_{v}s+K]X(s) = F(s)
\]
This is of the form
\[
[\text{Sum of impedances}] \cdot X(s) = [\text{Sum of applied forces}]
\]
similar (but not strictly analogous) to a mesh equation .
Point out: this is purely algebra; no derivatives appear explicitly once we are in the \(s\) ‑domain. This is the power of Laplace + impedance.
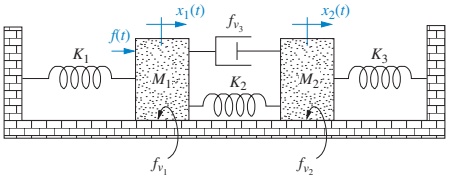
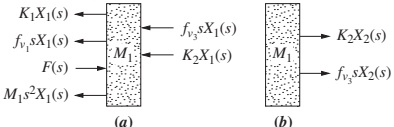
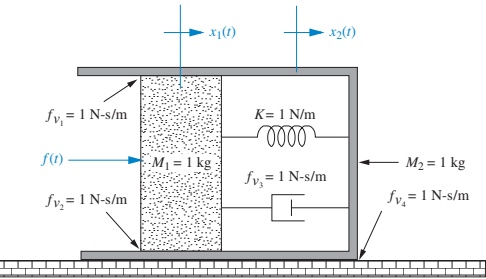
Example 2.17: Two-DOF Translational System
Problem:
Find transfer function \(G(s) = \dfrac{X_2(s)}{F(s)}\) for the system in Figure 2.17(a).
Two masses \(M_1, M_2\)
Springs \(K_1, K_2, K_3\)
Dampers \(f_{v1}, f_{v2}, f_{v3}\)
DOF:
\(x_1(t)\) : motion of \(M_1\) \(x_2(t)\) : motion of \(M_2\)
\(\Rightarrow\) 2 equations of motion needed.
Tell students: This is like two “masses on a track” with couplings. Goal: show how superposition is used to systematically derive equations.
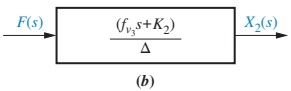
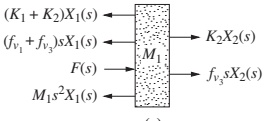
Example 2.17: Transfer Function
Solve the 2×2 system for \(X_2(s)/F(s)\) :
\[
\frac{X_{2}(s)}{F(s)} = G(s) = \frac{(f_{v_{3}}s+K_{2})}{\Delta}
\]
where
\[
\Delta=\left|\begin{array}{cc}
M_{1}s^{2} + (f_{v_{1}}+f_{v_{3}})s + (K_{1}+K_{2}) & -(f_{v_{3}}s+K_{2})\\
-(f_{v_{3}}s+K_{2}) & M_{2}s^{2} + (f_{v_{2}}+f_{v_{3}})s + (K_{2}+K_{3})
\end{array}\right|
\]
This is the determinant of the impedance matrix.
Again, form is identical to a 2‑loop RLC circuit if we replace masses, springs, dampers with inductors, capacitors, resistors via the analogy.
If time permits, briefly show or mention how Cramer’s Rule leads to the numerator/denominator structure. You can also quickly discuss resonance and coupled modes for intuition, but keep the algebra the primary focus.
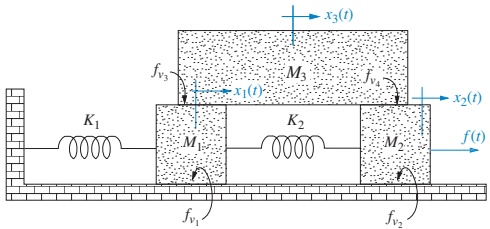
Example 2.18: 3‑DOF Translational — Equations by Inspection
We have three masses → 3 DOF (\(x_1, x_2, x_3\) ) .
General patterns (mesh-style):
For \(M_1\) :
\[
\big[\text{Sum of impedances connected to } x_1\big]X_{1}(s) -
\big[\text{Impedances between } x_1 \text{ and } x_2\big] X_{2}(s) -
\big[\text{Impedances between } x_1 \text{ and } x_3\big] X_{3}(s)
=
\big[\text{Sum of applied forces at } x_1\big]
\]
Similar structures hold for \(x_2\) and \(x_3\) .
This is an important conceptual leap: you can write equations by inspection from a network diagram, just like circuit mesh analysis, without individual FBDs.
Example 2.18: Final Equations
Using impedances (Table 2.4) and the pattern, we get:
For \(M_1\) :
\[
[M_{1}s^{2} + (f_{v_{1}}+f_{v_{3}})s + (K_{1}+K_{2})]X_{1}(s) - K_{2}X_{2}(s) - f_{v_{3}}s X_{3}(s) = 0
\]
For \(M_2\) :
\[
-K_{2}X_{1}(s) + [M_{2}s^{2} + (f_{v_{2}}+f_{v_{4}})s + K_{2}]X_{2}(s) - f_{v_{4}}sX_{3}(s) = F(s)
\]
For \(M_3\) :
\[
-f_{v_{3}}s X_{1}(s) - f_{v_{4}}s X_{2}(s) + [M_{3}s^{2}+(f_{v_{3}}+f_{v_{4}})s]X_{3}(s) = 0
\]
These are the equations of motion ; we can solve for any \(X_i(s)\) or transfer function we need.
Point out that solving a 3×3 system is algebraically messier, but software (MATLAB, Python) handles it easily. The key skill is setting up the equations correctly.
Transition to Rotational Systems
We now move from translational to rotational systems.
The procedure is identical , except:
Force \(f\) → Torque \(T\) Displacement \(x\) → Angular displacement \(\theta\) Velocity \(v\) → Angular velocity \(\omega\) Mass \(M\) → Moment of inertia \(J\)
Mechanical elements:
Rotational spring (twist)
Rotational damper (torsional friction)
Inertia
Everything we did for \(x(t)\) and \(f(t)\) now repeats for \(\theta(t)\) and \(T(t)\) .
This is a good moment to connect to physical ECE systems: motors, gear trains, torsional shafts, disk drives.
Rotational Elements & Equations (Time Domain)
Table 2.5: Rotational analogs
Spring
\(T(t) = K\displaystyle\int_{0}^{t}\omega(\tau)d\tau\) \(T(t) = K\theta(t)\)
Viscous damper
\(T(t) = D\omega(t)\) \(T(t) = D\dfrac{d\theta(t)}{dt}\)
Inertia
\(T(t) = J\dfrac{d\omega(t)}{dt}\) \(T(t) = J\dfrac{d^{2}\theta(t)}{dt^{2}}\)
Units:
\(T(t)\) – N·m\(\theta(t)\) – rad\(\omega(t)\) – rad/s\(K\) – N·m/rad\(D\) – N·m·s/rad\(J\) – kg·m²
Rotational impedance:
\[
Z_M(s) = \frac{T(s)}{\theta(s)} =
\begin{cases}
K & \text{(spring)} \\
Ds & \text{(damper)} \\
Js^2 & \text{(inertia)}
\end{cases}
\]
Point out how perfectly analogous this table is to Table 2.4. Students should be convinced that the same mathematical machinery applies.
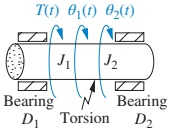
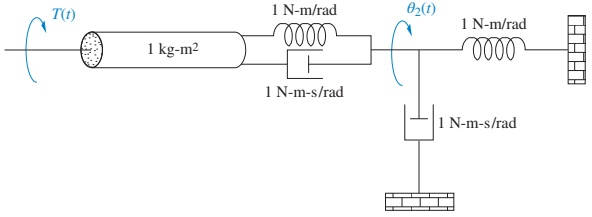
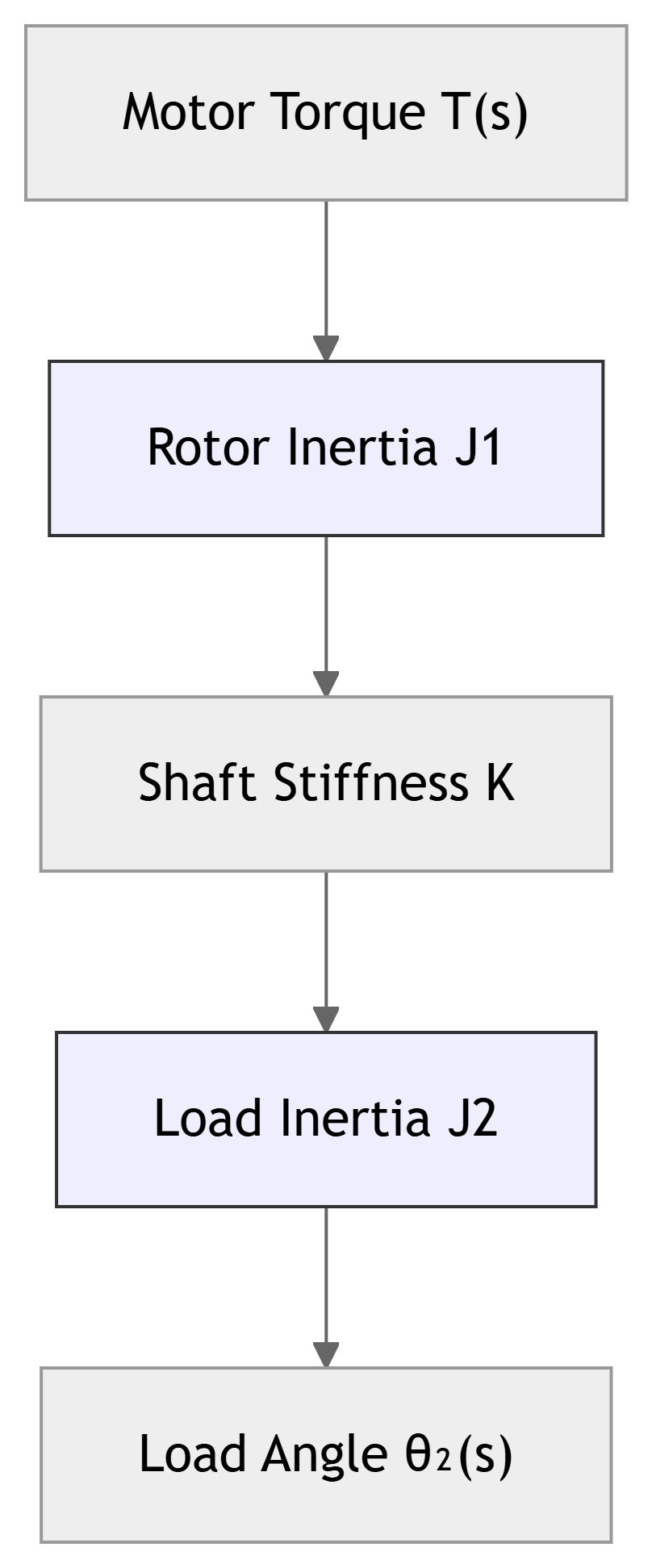
Rotational Example 2.19: Physical Setup
Problem:
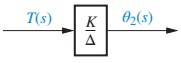
Find \(G(s) = \dfrac{\theta_2(s)}{T(s)}\) for the system in Figure 2.22(a).
A shaft undergoing torsion between two inertias \(J_1\) and \(J_2\) .
A torque input \(T(t)\) applied at the left.
Output is angular displacement \(\theta_2\) at the right.
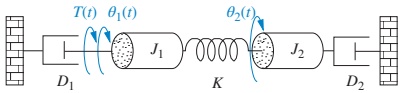
Modeling approximations:
Shaft torsion modeled as a lumped spring of stiffness \(K\) .
Inertia on left = \(J_1\) , on right = \(J_2\) .
Damping in shaft is negligible; local inertias have viscous damping \(D_1\) , \(D_2\) .
Mention that this models things like a motor connected to a load by a flexible shaft. The “springiness” of the shaft can introduce torsional oscillations.
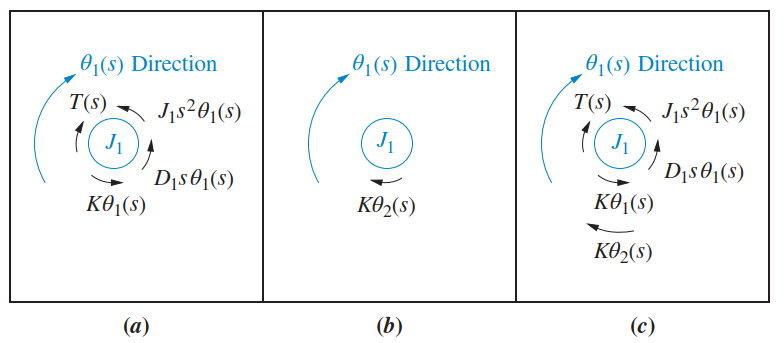
Example 2.19: Free-Body Diagrams by Superposition
We again use superposition :
For \(J_1\) :
Rotate \(J_1\) with \(J_2\) fixed → torques due to \(J_1\) ’s own motion (inertia, damping, spring twist).
Rotate \(J_2\) with \(J_1\) fixed → torques on \(J_1\) due to \(J_2\) ’s motion (spring twist).
Add them → total torques on \(J_1\) .
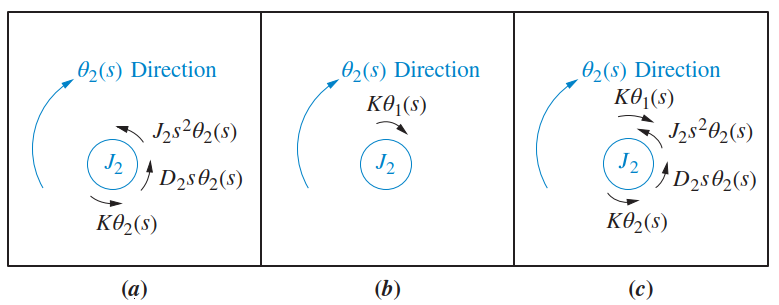
Similarly for \(J_2\) , using Figure 2.24.
Explain the spring torque: \(K(\theta_1 - \theta_2)\) . When you fix one angle and move the other, you get a torque proportional to their relative displacement.
Example 2.19: Equations of Motion (Laplace)
From the FBDs:
\[
(J_{1}s^{2}+D_{1}s+K)\theta_{1}(s)-K\theta_{2}(s)=T(s)
\]
\[
-K\theta_{1}(s)+(J_{2}s^{2}+D_{2}s+K)\theta_{2}(s)=0
\]
Again, matrix form:
\[
\begin{bmatrix}
J_{1}s^{2}+D_{1}s+K & -K\\
-K & J_{2}s^{2}+D_{2}s+K
\end{bmatrix}
\begin{bmatrix}
\theta_1(s) \\ \theta_2(s)
\end{bmatrix}
=
\begin{bmatrix}
T(s) \\ 0
\end{bmatrix}
\]
Solve for \(\theta_2(s)/T(s)\) :
\[
\frac{\theta_{2}(s)}{T(s)}=\frac{K}{\Delta}
\]
with
\[
\Delta=\left|\begin{array}{cc}
J_{1}s^{2}+D_{1}s+K & -K\\
-K & J_{2}s^{2}+D_{2}s+K
\end{array}\right|
\]
Compare side-by-side with Example 2.17: same structure, just \(J,D,K,\theta\) instead of \(M,f_v,K,x\) . This confirms that students can reuse translational intuition for rotational systems.
Example 2.19: MATLAB Support (TryIt 2.9)
In MATLAB with Symbolic Math Toolbox, the matrix equation can be solved symbolically:
syms s J1 D1 K T J2 D2 theta1 theta2 A = [J1 * s ^ 2 + D1 * s + K , - K ; - K , J2 * s ^ 2 + D2 * s + K ]; B = [theta1 ; theta2 ]; C = [T ; 0 ]; B = inv (A )* C ; % or B = A\C; theta2 = B (2 )pretty (theta2 )This yields an expression matching
\[
\theta_2(s) = \frac{K}{\Delta} T(s)
\]
Encourage students to use symbolic tools to check their algebra, but emphasize they should still be able to set up the equations themselves .
Example 2.20: 3‑DOF Rotational — Equations by Inspection
Angles: \(\theta_1, \theta_2, \theta_3\) → 3 DOF .
The generic pattern (mesh-style):
For \(\theta_1\) :
Sum of impedances connected to \(\theta_1\) times \(\theta_1(s)\)
Minus each impedance between \(\theta_1\) and other DOF times the corresponding angle = Sum of applied torques at \(\theta_1\)
Same idea for \(\theta_2\) and \(\theta_3\) .
This is the direct rotational analog of Example 2.18. Again, the main learning target is recognizing and applying the pattern.
Example 2.20: Final Equations
Applying the pattern:
\[
\begin{aligned}
(J_{1}s^{2}+D_{1}s+K)\theta_{1}(s) &- K\theta_{2}(s) &- 0\theta_{3}(s) &= T(s) \\
-K\theta_{1}(s) &+ (J_{2}s^{2}+D_{2}s+K)\theta_{2}(s) &- D_{2}s\theta_{3}(s) &= 0\\
-0\theta_{1}(s) &- D_{2}s\theta_{2}(s) &+ (J_{3}s^{2}+D_{3}s+D_{2}s)\theta_{3}(s) &= 0
\end{aligned}
\]
Again, we have a 3×3 linear system in \(\theta_1(s)\) , \(\theta_2(s)\) , \(\theta_3(s)\) .
These equations are ready to be solved for transfer functions like \(\theta_3(s)/T(s)\) or \(\theta_2(s)/T(s)\) using matrix methods.
Point out that cross-coupling appears in the off-diagonal terms: \(-K\) and \(-D_2 s\) . Students should see how springs and dampers “connect” DOFs just like resistors connect nodes or meshes.
Real-World ECE Applications
Where do these models show up?
DC motor position control:
Motor rotor → inertia \(J\)
Load gear/shaft → spring \(K\) (torsional flexibility) + damping \(D\)
Servo systems (antenna pointing, camera gimbals):
Rotational shafts with compliance and damping.
Hard disk drives / tape drives:
Rotational platters and head actuators.
Robotics joints:
Link flexibilities modeled with springs/dampers; joint inertia modeled as \(J\) .
In each case, the controller design relies on an accurate transfer function.
Tie back to the earlier torsional example: the motor–load shaft system is mathematically the same as Example 2.19. Highlight that modeling flexibility (non-rigid connections) is often crucial to avoid oscillations and instability.
Translational & Rotational Mechanical Systems – Interactive Addendum
Addendum Interactive Deck
How This Interactive Deck Works
This addendum lets you experiment with the ideas from Sections 2.5–2.6 directly in the browser.
You will:
Tweak mass–spring–damper and rotational parameters and see how transfer functions and responses change.
Use Pyodide (Python in WebAssembly) for live code execution.
Use Observable JS (OJS) sliders + Pyodide + Plotly for reactive plots.
Tips:
Change parameters and re‑run code blocks to see immediate effects.
Focus on the connection between physical parameters (\(M, f_v, K, J, D\) ) and the resulting transfer function / response.
1. Translational Mass–Spring–Damper: Build the Transfer Function
Use this interactive Python cell to compute the transfer function
\[
G(s) = \frac{X(s)}{F(s)} = \frac{1}{Ms^2 + f_v s + K}
\]
for user‑chosen parameters.
Try:
Set fv_val = 0.0 to see the undamped transfer function.
Increase fv_val and observe how the denominator changes.
2. Translational System: Explore Pole Locations
The poles of \(G(s)\) are the roots of \(Ms^2 + f_v s + K = 0\) .
Use this block to compute the poles for your chosen parameters.
Questions to think about:
When are the poles real vs. complex ?
How does increasing damping \(f_v\) move the poles?
3. Reactive Plot: Translational Step Response vs. Parameters
Use the sliders to adjust \(M\) , \(f_v\) , and \(K\) . A step response of the mass–spring–damper system will update automatically.
= Inputs. range ([0.2 , 5 ], {step : 0.2 , label : "Mass M (kg)" , value : 1 })= Inputs. range ([0 , 10 ], {step : 0.5 , label : "Damping f_v (N·s/m)" , value : 2 })= Inputs. range ([0.5 , 20 ], {step : 0.5 , label : "Stiffness K (N/m)" , value : 5 })
Try:
Set fv_tr = 0 and see the oscillatory behavior.
Increase fv_tr and observe the motion become more damped .
Change K_tr to see how the stiffness changes the oscillation frequency.
4. Visualizing Mechanical Impedance Magnitudes
Mechanical impedances in the \(s=j\omega\) domain:
Mass: \(Z_M(j\omega) = M (j\omega)^2 = -M\omega^2\)
Damper: \(Z_M(j\omega) = f_v (j\omega)\)
Spring: \(Z_M(j\omega) = K\)
Use sliders to vary \(M\) , \(f_v\) , and \(K\) , and see how the magnitude of each changes over frequency.
= Inputs. range ([0.2 , 5 ], {step : 0.2 , label : "Mass M for impedance" , value : 1 })= Inputs. range ([0 , 10 ], {step : 0.5 , label : "Damping f_v for impedance" , value : 2 })= Inputs. range ([0.5 , 20 ], {step : 0.5 , label : "Stiffness K for impedance" , value : 5 })
Observe:
At low frequency , which element dominates?
At high frequency , which element dominates?
How does increasing each parameter shift the curves?
5. 2‑DOF Translational System: Interactive Coefficients
Consider the 2‑DOF system from Example 2.17. We focus on the diagonal terms of the impedance matrix:
\(Z_{11} = M_1 s^2 + (f_{v1}+f_{v3})s + (K_1 + K_2)\) \(Z_{22} = M_2 s^2 + (f_{v2}+f_{v3})s + (K_2 + K_3)\)
Use sliders to choose parameters and see how the coefficients of \(s^2\) , \(s\) , and constant terms change.
= Inputs. range ([0.5 , 5 ], {step : 0.5 , label : "M1 (kg)" , value : 1 })= Inputs. range ([0.5 , 5 ], {step : 0.5 , label : "M2 (kg)" , value : 2 })= Inputs. range ([0 , 10 ], {step : 0.5 , label : "f_v1 (N·s/m)" , value : 1 })= Inputs. range ([0 , 10 ], {step : 0.5 , label : "f_v2 (N·s/m)" , value : 1 })= Inputs. range ([0 , 10 ], {step : 0.5 , label : "f_v3 (N·s/m)" , value : 2 })= Inputs. range ([0 , 20 ], {step : 1 , label : "K1 (N/m)" , value : 2 })= Inputs. range ([0 , 20 ], {step : 1 , label : "K2 (N/m)" , value : 5 })= Inputs. range ([0 , 20 ], {step : 1 , label : "K3 (N/m)" , value : 3 })
Use this to see the mesh-like pattern :
Diagonal terms: “self” impedances.
Off-diagonal: negative of “between” impedances.
6. Rotational System: Build the Transfer Function
Now switch to rotational systems. For a 1‑DOF rotational system (spring–damper–inertia):
\[
G(s) = \frac{\theta(s)}{T(s)} = \frac{1}{Js^2 + D s + K}
\]
Experiment with this interactive block.
Compare this form with the translational case. They are structurally identical, just with different physical units.
7. Rotational 2‑DOF (Example 2.19): Impedance Matrix Exploration
For Example 2.19, the equations are:
\[
(J_{1}s^{2}+D_{1}s+K)\theta_{1}(s)-K\theta_{2}(s)=T(s)
\]
\[
-K\theta_{1}(s)+(J_{2}s^{2}+D_{2}s+K)\theta_{2}(s)=0
\]
Use sliders to explore the impedance matrix and its determinant \(\Delta\) .
= Inputs. range ([0.1 , 5 ], {step : 0.1 , label : "J1 (kg·m²)" , value : 0.5 })= Inputs. range ([0.1 , 5 ], {step : 0.1 , label : "J2 (kg·m²)" , value : 1.0 })= Inputs. range ([0 , 5 ], {step : 0.2 , label : "D1 (N·m·s/rad)" , value : 0.5 })= Inputs. range ([0 , 5 ], {step : 0.2 , label : "D2 (N·m·s/rad)" , value : 0.5 })= Inputs. range ([0.5 , 20 ], {step : 0.5 , label : "K (N·m/rad)" , value : 5 })
Reflect:
How does increasing \(K\) affect \(\Delta\) and \(G(s)\) ?
What happens if you increase \(D_1\) or \(D_2\) ?
8. Rotational 1‑DOF: Reactive Step Response
Use sliders to adjust \(J\) , \(D\) , and \(K\) and see the step response in angle \(\theta(t)\) .
= Inputs. range ([0.1 , 5 ], {step : 0.1 , label : "J (kg·m²)" , value : 1 })= Inputs. range ([0 , 5 ], {step : 0.1 , label : "D (N·m·s/rad)" , value : 0.5 })= Inputs. range ([0.5 , 20 ], {step : 0.5 , label : "K (N·m/rad)" , value : 3 })
Explore:
\(D = 0\) → purely oscillatory response.Larger \(D\) → more damping.
Larger \(K\) → higher natural frequency.
9. Compare Translational vs Rotational Models Side-by-Side
Use this cell to print both transfer functions side-by-side for your chosen parameters.
Notice the pattern:
Same mathematical structure , different physical meanings.
This is why mechanical systems can be treated like RLC networks once we define appropriate analogies and impedances.
10. Your Turn: Design a Simple 2‑DOF System
Use this empty template to quickly prototype your own 2‑DOF translational system equations in Python.
Next challenge (outside this block):
Assume input force \(F(s)\) acts at \(x_1\) , write the right‑hand side vector, and solve for \(X_2(s)/F(s)\) .
Wrap-Up: What You Should Take Away
Using these interactive blocks, you have:
Manipulated mass–spring–damper and rotational system parameters and seen their impact on transfer functions and time responses.
Observed how mechanical impedance shapes frequency response.
Seen how multi‑DOF systems lead to mesh-like impedance matrices , just like in circuits.
Practiced using symbolic and numerical tools (via Pyodide) to reinforce the theory from Sections 2.5–2.6.
Use this deck as a sandbox: modify code, change parameters, and relate every change you see back to the underlying physics + Laplace-domain algebra .