Modeling in the Frequency Domain
Sistem Kendali 2.1
Imron Rosyadi
Learning Objectives
By the end of this session, you will be able to:
- Explain why control engineers prefer transfer functions over raw differential equations.
- Recall and use key Laplace transform pairs and theorems.
- Perform partial‑fraction expansion for real, repeated, and complex roots.
- Use Laplace transforms to solve linear differential equations with zero initial conditions.
- Define and compute a transfer function from a given differential equation.
- Relate simple transfer functions to time‑domain responses (step, ramp) relevant to ECE systems.
From Differential Equations to Block Diagrams
- Many physical systems → differential equations (DEs) relating input and output.
- But DEs:
- Mix input, output, and parameters everywhere.
- Are hard to interconnect for multi‑block systems.
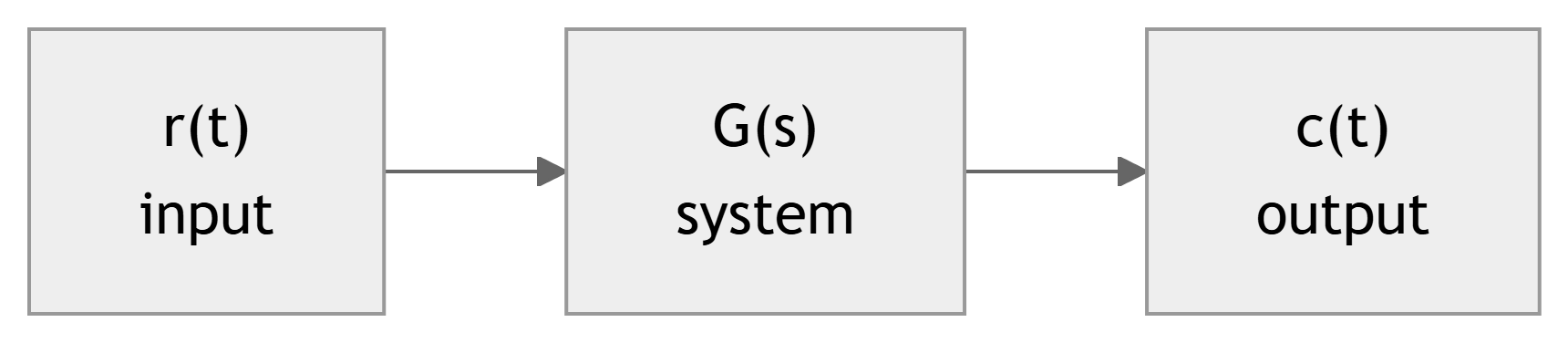
- We want:
- A clean separation: input, system, output.
- Simple rules for connecting subsystems in cascade, feedback, etc.
Single block:
Cascaded blocks:

Why Frequency‑Domain Modeling?
- Laplace transform:
- Handles exponentials and sinusoids.
- Turns \(d/dt\) into multiplication by \(s\).
- This leads to transfer functions: algebraic ratios in \(s\) that:
- Model circuits, motors, sensors, amplifiers.
- Are easy to connect and analyze.
Tip
Think: time domain = “oscilloscope view”. Laplace/frequency domain = “algebra and plots” view for design.
Laplace Transform: Definition
We define the (unilateral) Laplace transform as
\[ \mathcal{L}[f(t)] = F(s) = \int_{0^-}^{\infty} f(t) e^{-st}\, dt,\quad s=\sigma + j\omega \]
- \(f(t)\): time‑domain signal (usually \(t\ge 0\) in control).
- \(F(s)\): Laplace‑domain representation.
- Lower limit \(0^-\) means we can handle discontinuities at \(t=0\), including impulses.
Inverse Laplace transform:
\[ \mathcal{L}^{-1}[F(s)] = \frac{1}{2\pi j} \int_{\sigma - j\infty}^{\sigma + j\infty} F(s)e^{st} ds = f(t) u(t) \]
- \(u(t)\): unit step, forcing causality (zero for \(t<0\)).
Key Laplace Transform Pairs (Table 2.1 Excerpts)
Time domain \(f(t)\)
- \(\delta(t)\)
- \(u(t)\)
- \(t u(t)\)
- \(t^{n}u(t)\)
- \(e^{-a t} u(t)\)
- \(\sin \omega t \, u(t)\)
- \(\cos \omega t \, u(t)\)
Laplace domain \(F(s)\)
- \(1\)
- \(\dfrac{1}{s}\)
- \(\dfrac{1}{s^{2}}\)
- \(\dfrac{n!}{s^{n+1}}\)
- \(\dfrac{1}{s + a}\)
- \(\dfrac{\omega}{s^{2} + \omega^{2}}\)
- \(\dfrac{s}{s^{2} + \omega^{2}}\)
Important
These seven pairs cover most standard test signals in control: impulse, step, ramp, exponentials, and sinusoids. You should be able to recognize and use them without a table over time.
Interactive Check: Compute a Simple Laplace Transform
Use the definition to compute the Laplace transform of \(f(t) = Ae^{-at}u(t)\).
Example 2.1 – Laplace Transform of \(A e^{-a t} u(t)\)
We want \(\mathcal{L}[f(t)]\) for \(f(t) = A e^{-a t} u(t)\).
Since there is no impulse at \(t=0\), we can start at 0:
\[ \begin{aligned} F(s) &= \int_{0}^{\infty} A e^{-a t} e^{-s t} dt \\ &= A \int_{0}^{\infty} e^{-(s + a)t} dt \\ &= -\frac{A}{s+a} e^{-(s+a)t} \bigg|_{0}^{\infty} \\ &= \frac{A}{s+a} \end{aligned} \]
So
\[ \mathcal{L}[A e^{-a t} u(t)] = \frac{A}{s + a} \]
Laplace Transform Theorems
Linearity
- \(\mathcal{L}[k f(t)] = k F(s)\)
- \(\mathcal{L}[f_1(t) + f_2(t)] = F_1(s) + F_2(s)\)
Frequency shift
- \(\mathcal{L}[e^{-a t} f(t)] = F(s + a)\)
Differentiation in time
- \(\mathcal{L}\left[\dfrac{df}{dt}\right] = sF(s) - f(0^-)\)
Integration in time
- \(\mathcal{L}\left[\int_0^t f(\tau)\, d\tau \right] = \dfrac{F(s)}{s}\)
Value theorems:
- Final value: \(f(\infty) = \displaystyle\lim_{s\to 0} s F(s)\) (under stability conditions).
- Initial value: \(f(0^+) = \displaystyle\lim_{s\to\infty} s F(s)\) (under continuity conditions).
Warning
Value theorems have conditions:
- Final value only if all poles of \(sF(s)\) have negative real parts or at most one at the origin.
- Initial value only if \(f(t)\) has no impulses at \(t=0\).
Inverse Laplace via Tables & Theorems – Example 2.2
Given:
\[ F_1(s) = \frac{1}{(s+3)^2} \]
We know from Table 2.1:
- \(\mathcal{L}[t u(t)] = \dfrac{1}{s^2}\).
Use the frequency shift theorem:
- If \(\mathcal{L}[t] = \dfrac{1}{s^2}\), then \(\mathcal{L}[e^{-a t} t] = \dfrac{1}{(s + a)^2}\).
So with \(a = 3\):
\[ \mathcal{L}^{-1}\left[\frac{1}{(s+3)^2}\right] = e^{-3t} t u(t) \]
Why Partial‑Fraction Expansion?
Many \(F(s)\) arise as ratios of polynomials:
\[ F(s) = \frac{N(s)}{D(s)},\quad \deg N < \deg D \]
Usually not in table form directly.
Strategy:
- Factor \(D(s)\) into simple factors.
- Express \(F(s)\) as a sum of simple terms.
- Use the table on each term.
Note
If \(\deg N \ge \deg D\), perform polynomial long division first to get polynomial + proper fraction (numerator degree < denominator degree).
Example: Need for Long Division
Given
\[ F_1(s) = \frac{s^3 + 2s^2 + 6s + 7}{s^2 + s + 5} \]
Perform polynomial division:
\[ F_1(s) = s + 1 + \frac{2}{s^2 + s + 5} \]
Then inverse Laplace:
\[ f_1(t) = \frac{d\delta(t)}{dt} + \delta(t) + \mathcal{L}^{-1}\left[\frac{2}{s^2 + s + 5}\right] \]
- The polynomial part (\(s + 1\)) represents impulses and derivatives at \(t=0\).
- The proper fraction is where the physical transient lies.
Case 1: Real, Distinct Poles
Example:
\[ F(s) = \frac{2}{(s+1)(s+2)} \]
Assume
\[ F(s) = \frac{K_1}{s+1} + \frac{K_2}{s+2} \]
Solve residues:
- Multiply by \((s+1)\) and set \(s=-1\) → \(K_1 = \dfrac{2}{-1+2} = 2\).
- Multiply by \((s+2)\) and set \(s=-2\) → \(K_2 = \dfrac{2}{-2+1} = -2\).
Case 1: Real, Distinct Poles
So
\[ F(s) = \frac{2}{s+1} - \frac{2}{s+2} \]
Inverse Laplace:
\[ f(t) = 2 e^{-t} - 2 e^{-2t} \]
Tip
For distinct real poles at \(-p_1, -p_2, ..., -p_n\):
\[ F(s) = \sum_{i=1}^n \frac{K_i}{s + p_i},\quad K_i = (s + p_i) F(s)\big|_{s = -p_i} \]
Example 2.3 – DE Solution via Laplace (Setup)
Given system:
\[ \frac{d^2 y}{dt^2} + 12 \frac{dy}{dt} + 32 y = 32 u(t),\quad y(0^-) = 0,\ \dot{y}(0^-) = 0 \]
- Take Laplace of each term using differentiation theorems and \(u(t) \leftrightarrow 1/s\):
\[ s^2 Y(s) + 12 s Y(s) + 32 Y(s) = \frac{32}{s} \]
- Solve for \(Y(s)\):
\[ Y(s) = \frac{32}{s(s^2 + 12s + 32)} = \frac{32}{s (s+4)(s+8)} \]
Now we just need partial fractions.
Example 2.3 – Partial Fractions and Solution
Assume
\[ Y(s) = \frac{K_1}{s} + \frac{K_2}{s+4} + \frac{K_3}{s+8} \]
Use cover‑up method:
- \(K_1 = \dfrac{32}{(s+4)(s+8)}\bigg|_{s=0} = 1\)
- \(K_2 = \dfrac{32}{s(s+8)}\bigg|_{s=-4} = -2\)
- \(K_3 = \dfrac{32}{s(s+4)}\bigg|_{s=-8} = 1\)
Example 2.3 – Partial Fractions and Solution
So
\[ Y(s) = \frac{1}{s} - \frac{2}{s+4} + \frac{1}{s+8} \]
Inverse Laplace:
\[ y(t) = 1 - 2 e^{-4t} + e^{-8t} \]
Note
We often drop the explicit \(u(t)\) factor in notation, assuming causal systems with inputs applied at \(t=0\).
Interactive Practice: Partial Fractions in Python
Try a partial‑fraction expansion of
\[ F(s) = \frac{2}{(s+1)(s+2)} \]
Modify the expression in the code cell to experiment with other denominators.
Case 2: Real, Repeated Poles
Example:
\[ F(s) = \frac{2}{(s+1)(s+2)^2} \]
We write:
\[ F(s) = \frac{K_1}{s+1} + \frac{K_2}{(s+2)^2} + \frac{K_3}{s+2} \]
Case 2: Real, Repeated Poles
Procedure:
- \(K_1\) via cover‑up (still simple pole):
- Multiply by \((s+1)\) and set \(s=-1\): \(K_1 = 2\).
- \(K_2\) isolate by multiplying by \((s+2)^2\) and setting \(s=-2\):
- \(K_2 = -2\).
- For \(K_3\) (other term in repeated root):
- Differentiate the expression where \((s+2)^2 F(s)\) is isolated, then set \(s=-2\) to solve for \(K_3\): \(K_3 = -2\).
So
\[ f(t) = 2 e^{-t} - 2 t e^{-2t} - 2 e^{-2t} \]
Tip
For a repeated pole at \(s = -p\) of multiplicity \(r\), the expansion is
\[ \sum_{i=1}^r \frac{K_i}{(s+p)^i} \]
Corresponding time terms are of the form \(t^{i-1} e^{-p t}\).
Case 3: Complex or Imaginary Poles
Example:
\[ F(s) = \frac{3}{s(s^2 + 2s + 5)} \]
We use
\[ F(s) = \frac{K_1}{s} + \frac{K_2 s + K_3}{s^2 + 2s + 5} \]
- \(K_1 = \dfrac{3}{5}\).
- Multiply both sides by \(s(s^2+2s+5)\) and equate coefficients to find \(K_2\), \(K_3\).
- Result: \(K_2 = -\dfrac{3}{5}\), \(K_3 = -\dfrac{6}{5}\).
Case 3: Complex or Imaginary Poles
So
\[ F(s) = \frac{3/5}{s} - \frac{3}{5}\frac{s+2}{s^2 + 2s + 5} \]
Complete the square:
\[ s^2 + 2s + 5 = (s + 1)^2 + 2^2 \]
Rewrite:
\[ F(s) = \frac{3/5}{s} - \frac{3}{5} \frac{(s+1) + 1}{(s+1)^2 + 4} \]
Match with
\[ \mathcal{L}[A e^{-a t}\cos\omega t + B e^{-a t}\sin\omega t] = \frac{A(s+a) + B\omega}{(s+a)^2 + \omega^2} \]
Yield
\[ f(t) = \frac{3}{5} - \frac{3}{5} e^{-t}\left(\cos 2t + \frac{1}{2} \sin 2t\right) \]
Or equivalently
\[ f(t) = 0.6 - 0.671 e^{-t} \cos(2t - \phi), \quad \phi \approx 26.57^\circ \]
Note
Complex poles → damped sinusoidal modes (oscillations that decay over time). This is crucial for understanding underdamped systems (e.g., RLC circuits, motor torque responses).
Alternate Complex‑Residue Method (Outline)
We can also expand
\[ \frac{3}{s(s^2+2s+5)} = \frac{3}{s(s+1+j2)(s+1-j2)} \]
as
\[ F(s) = \frac{K_1}{s} + \frac{K_2}{s+1+j2} + \frac{K_3}{s+1-j2} \]
\(K_2\) and \(K_3\) are complex conjugates.
After inverse Laplace, exponentials with \(e^{\pm j2t}\) combine via
\[ \cos\theta = \frac{e^{j\theta}+e^{-j\theta}}{2},\quad \sin\theta = \frac{e^{j\theta}-e^{-j\theta}}{2j} \]
to the same real expression as before.
Interactive Slider: Visualizing a Damped Sinusoid
Skill‑Assessment: Quick Laplace Transform
Exercise 2.1: Find \(\mathcal{L}[f(t)]\) for \(f(t) = t e^{-5t} u(t)\).
Using Table 2.1 and frequency shift:
- \(t u(t) \leftrightarrow 1/s^2\).
- Multiply by \(e^{-5t}\) → shift \(s \to s+5\):
\[ \mathcal{L}[t e^{-5t} u(t)] = \frac{1}{(s + 5)^2} \]
Laplace Transform → Transfer Function
We now connect Laplace transforms to transfer functions.
Start from a general LTI differential equation:
\[ a_n \frac{d^n c}{dt^n} + a_{n-1} \frac{d^{n-1} c}{dt^{n-1}} + \cdots + a_0 c(t) = b_m \frac{d^m r}{dt^m} + \cdots + b_0 r(t) \]
Take Laplace transforms (with zero initial conditions):
\[ (a_n s^n + a_{n-1} s^{n-1} + \cdots + a_0) C(s) = (b_m s^m + b_{m-1} s^{m-1} + \cdots + b_0) R(s) \]
Form the ratio
\[ \frac{C(s)}{R(s)} = G(s) = \frac{b_m s^m + b_{m-1} s^{m-1} + \cdots + b_0} {a_n s^n + a_{n-1} s^{n-1} + \cdots + a_0} \]
This \(G(s)\) is the transfer function:
- Describes the system alone (zero initial conditions).
- Input/output relationship: \(C(s) = G(s) R(s)\).
Important
The denominator of \(G(s)\) is the characteristic polynomial. Its roots → poles → fundamental dynamics (stability, oscillation, speed).
Transfer Function Block Representation
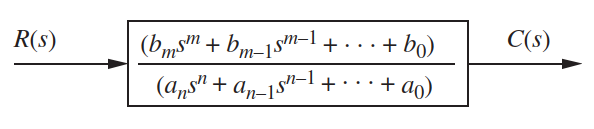
- Input: \(R(s)\) (Laplace transform of \(r(t)\)).
- Output: \(C(s)\) (Laplace transform of \(c(t)\)).
- Block: \(G(s)\) (system).
- Relationship: \(C(s) = G(s) R(s)\).
Example 2.4 – Transfer Function from DE
Given DE:
\[ \frac{dc}{dt} + 2c(t) = r(t) \]
- Laplace transform with zero initial conditions:
\[ s C(s) + 2 C(s) = R(s) \]
- Solve for \(C(s)/R(s)\):
\[ G(s) = \frac{C(s)}{R(s)} = \frac{1}{s + 2} \]
So the system is a first‑order low‑pass with pole at \(s = -2\).
Example 2.5 – Step Response from \(G(s)\)
We use \(G(s) = 1/(s+2)\) and input \(r(t) = u(t)\).
- Laplace of input: \(R(s) = 1/s\).
- Output transform:
\[ C(s) = G(s) R(s) = \frac{1}{s(s+2)} \]
- Partial fractions:
\[ C(s) = \frac{1/2}{s} - \frac{1/2}{s+2} \]
Example 2.5 – Step Response from \(G(s)\)
- Inverse Laplace:
\[ c(t) = \frac{1}{2} - \frac{1}{2} e^{-2t} \]
Interpretation:
- Starts at 0, asymptotically approaches 0.5.
- Time constant: 0.5 s → at \(t = 0.5\) s, ~63% of the way to 0.5.
Tip
You can check final value via final value theorem:
\[ c(\infty) = \lim_{s\to0} s \cdot C(s) = \lim_{s\to0} \frac{s}{s(s+2)} = \frac{1}{2} \]
Interactive Plot: First‑Order Step Response
Additional Skill‑Assessment Examples
Exercise 2.3: From DE
\[ \frac{d^3 c}{dt^3} + 3\frac{d^2 c}{dt^2} + 7\frac{dc}{dt} + 5c = \frac{d^2 r}{dt^2} + 4\frac{dr}{dt} + 3r \]
Transfer function:
\[ G(s) = \frac{s^2 + 4s + 3}{s^3 + 3s^2 + 7s + 5} \]
Exercise 2.4: From \(G(s)\) back to DE:
\[ G(s) = \frac{2s + 1}{s^2 + 6s + 2} \]
multiply both sides by denominator and inverse Laplace to get
\[ \frac{d^2 c}{dt^2} + 6\frac{dc}{dt} + 2c = 2\frac{dr}{dt} + r \]
Additional Skill‑Assessment Examples
Exercise 2.5: Ramp response from \(G(s) = \dfrac{s}{(s+4)(s+8)}\)
- Ramp input: \(r(t) = t u(t) \Rightarrow R(s) = 1/s^2\).
- Then \(C(s) = G(s)R(s)\), do partial fractions, invert.
Real‑World ECE Application Examples
1. RC low‑pass filter
Circuit: resistor R in series, capacitor C to ground.
Input: \(v_{in}(t)\), output: \(v_{out}(t)\) across C.
DE:
\[ RC \frac{dv_{out}}{dt} + v_{out} = v_{in} \]
Transfer function:
\[ G(s) = \frac{V_{out}(s)}{V_{in}(s)} = \frac{1}{RC s + 1} \]
2. DC motor speed control (simplified)
Input: armature voltage \(V_a(t)\).
Output: angular speed \(\omega(t)\).
Linearized model often:
\[ J \frac{d\omega}{dt} + B \omega = K_t i_a,\quad L \frac{di_a}{dt} + R i_a + K_e \omega = V_a \]
Combine and Laplace to get \(G(s) = \Omega(s)/V_a(s)\): typically a second‑order transfer function.
Summary / Key Points
- Laplace transform converts time‑domain functions and differential equations into algebraic expressions in \(s\).
- Laplace pairs and theorems (linearity, shift, differentiation, integration, value theorems) are essential tools.
- Partial‑fraction expansion is the main technique to invert rational \(F(s)\):
- Case 1: real distinct poles → sums of exponentials.
- Case 2: repeated poles → exponentials times polynomials in \(t\).
- Case 3: complex poles → exponentially damped sinusoids.
- A transfer function \(G(s) = C(s)/R(s)\) (zero initial conditions) cleanly separates input, system, and output and corresponds to block diagrams.
- From a DE ↔︎ transfer function:
- DE → Laplace → algebra → \(C(s)/R(s) = G(s)\).
- \(G(s)\) + input Laplace → \(C(s)\) → partial fractions → \(c(t)\).
Formulas Summary
Laplace transform definition:
\[ \mathcal{L}[f(t)] = F(s) = \int_{0^-}^{\infty} f(t) e^{-s t}\, dt \]
Inverse Laplace:
\[ \mathcal{L}^{-1}[F(s)] = \frac{1}{2\pi j} \int_{\sigma - j\infty}^{\sigma + j\infty} F(s)e^{st}\, ds = f(t)u(t) \]
Formulas Summary
Selected transform pairs:
- \(\delta(t) \leftrightarrow 1\)
- \(u(t) \leftrightarrow \dfrac{1}{s}\)
- \(t^n u(t) \leftrightarrow \dfrac{n!}{s^{n+1}}\)
- \(e^{-at} u(t) \leftrightarrow \dfrac{1}{s+a}\)
- \(\sin \omega t\, u(t) \leftrightarrow \dfrac{\omega}{s^2 + \omega^2}\)
- \(\cos \omega t\, u(t) \leftrightarrow \dfrac{s}{s^2 + \omega^2}\)
Formulas Summary
Key theorems:
- Linearity: \(\mathcal{L}[k f(t)] = kF(s)\), \(\mathcal{L}[f_1+f_2] = F_1+F_2\).
- Frequency shift: \(\mathcal{L}[e^{-at} f(t)] = F(s + a)\).
- Differentiation: \(\mathcal{L}\left[\dfrac{df}{dt}\right] = sF(s) - f(0^-)\).
- Integration: \(\mathcal{L}\left[\int_0^{t} f(\tau)d\tau\right] = \dfrac{F(s)}{s}\).
- Final value: \(f(\infty) = \lim_{s\to 0} sF(s)\) (under stability conditions).
- Initial value: \(f(0^+) = \lim_{s\to \infty} sF(s)\) (if no impulses at 0).
Transfer function (zero initial conditions):
From DE:
\[ \frac{C(s)}{R(s)} = G(s) = \frac{b_m s^m + \cdots + b_0} {a_n s^n + \cdots + a_0} \]
Input–output relation:
\[ C(s) = G(s) R(s) \]